3Explanation of operation methods
Returning to the Safe Point 3-31
3.4 Returning to the Safe Point
The robot can be moved to the safe point specified by the JSAFE parameter.
The safe point return procedure is as follows:
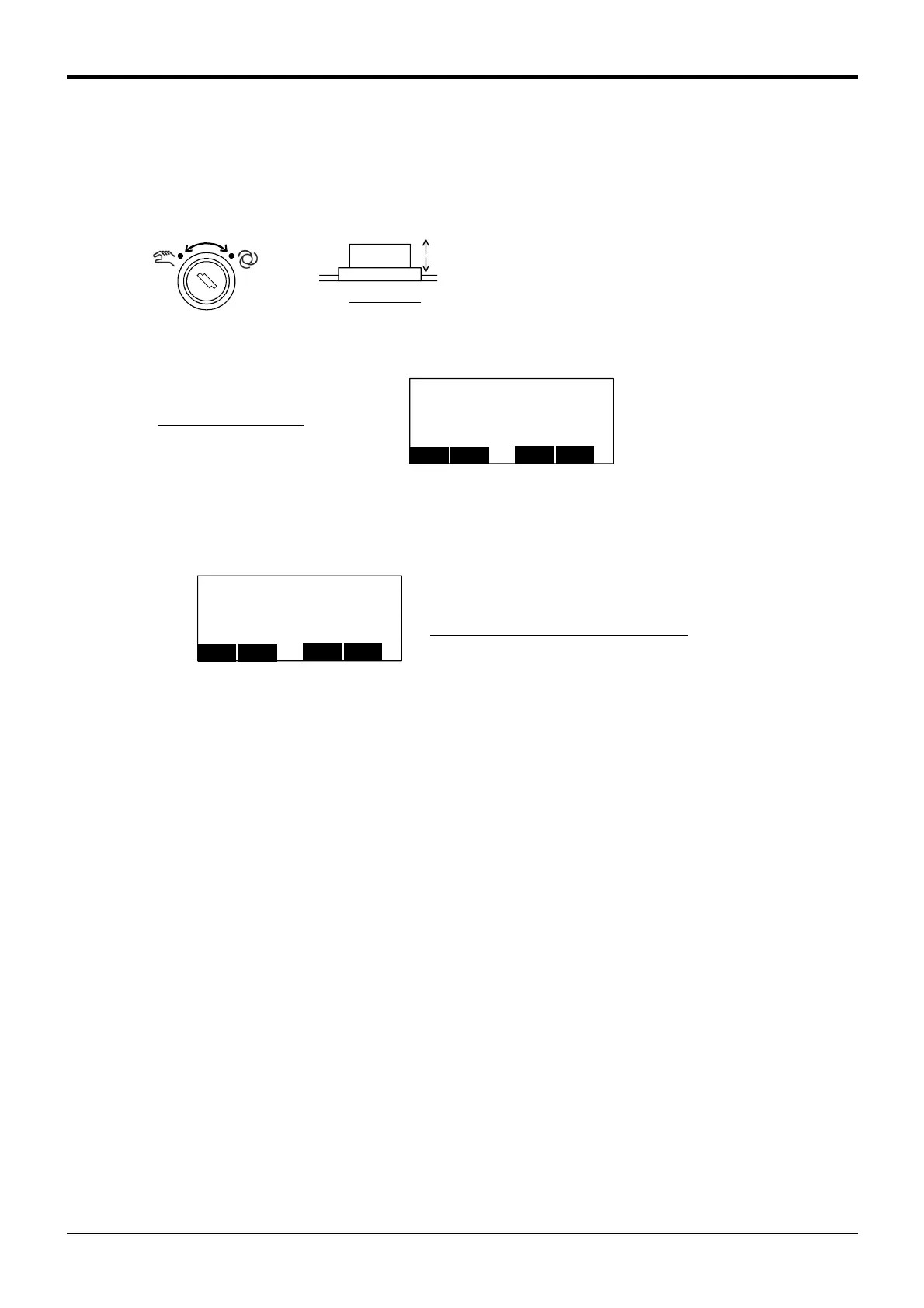
1) Set the controller mode to "MANUAL". Push the [ENABLE] switch of T/B and enable T/B.
2) Press down the enabling switch (3 position switch), press the [SERVO] key and carry out servo-on.
3) Press the "HAND" key and display the <hand> screen.
4) Pressing the function key currently assigned to "SAFE" is kept with the enabling switch (3 position
switch) pressed down. While keeping pushing, the robot does safe point return movement and
[START] LED of the controller unit turns on during movement.
If either is detached in the middle of movement, the robot will stop.
Down:
ENABLE
*Lighting
Up :
DISABLE
Rear of T/B
<HAND> ±C : HAND1 ±Z : HAND4
±B : HAND2 ±Y : HAND5
±A : HAND3 ±X : HAND6
76543210 76543210
OUT-900□□□□□□ IN-900□□□□□□
CLOSE
HND
ALIGN
SAFE
Execution of safe point return "SAFE"
<HAND> ±C : HAND1 ±Z : HAND4
±B : HAND2 ±Y : HAND5
±A : HAND3 ±X : HAND6
76543210 76543210
OUT-900□□□□□□ IN-900□□□□□□
CLOSE
HND
ALIGN
SAFE
 Loading...
Loading...




