5Functions set with parameters
Interference avoidance function 6-535
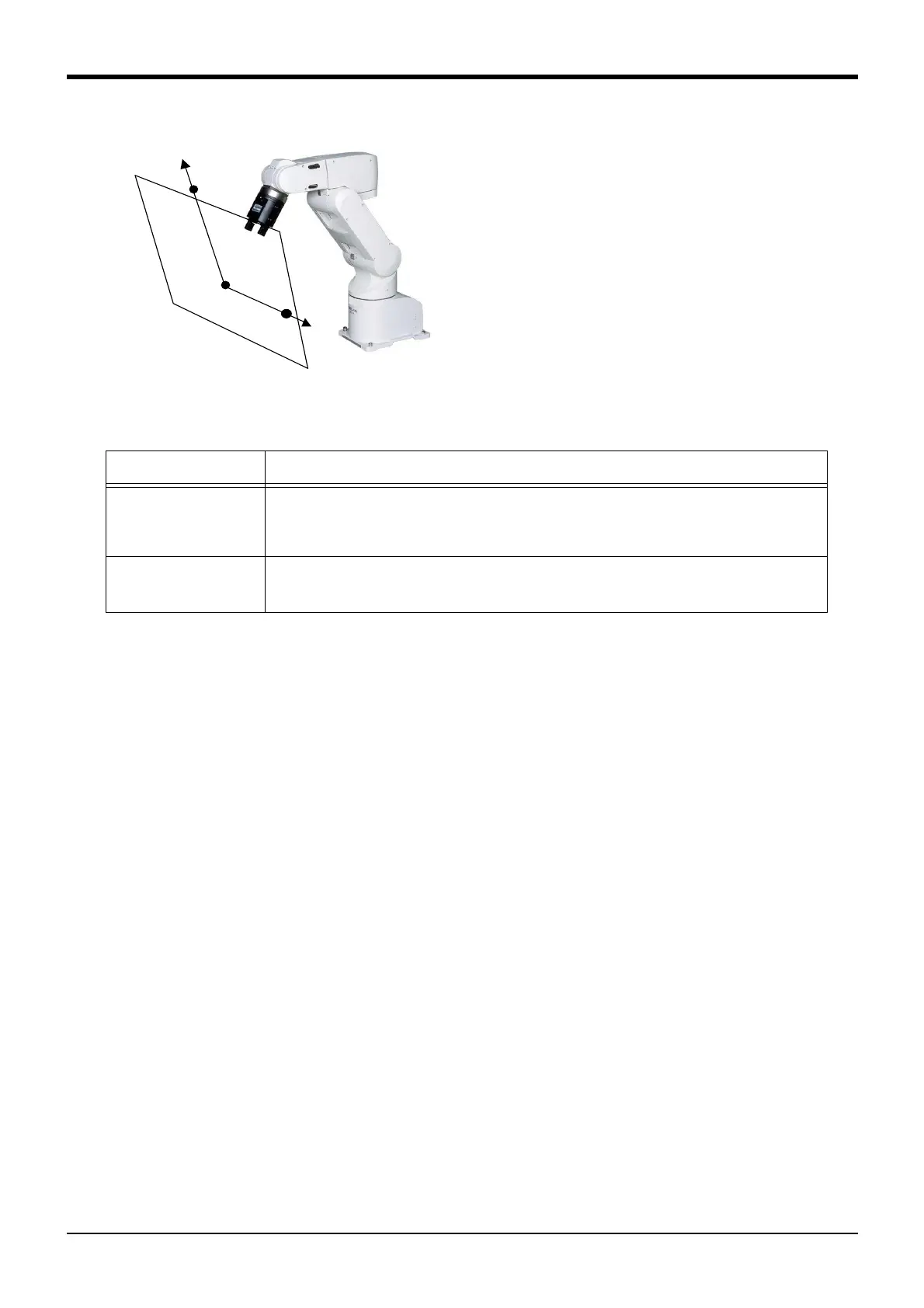
As can be seen in the diagram to the left, any
plane can be defined by three points (P1, P2, and
P3).
Table 5-37:Details of free plane limit registration
Parameter and value
Explanation
SFCnP(n=1 to 8) Specifies the 3 points that define the plane.
P1 coordinates X1, Y1, and Z1: The origin of the plane
P2 coordinates X2,Y2,Z2: A position on the X axis of the plane
P3 coordinates X3,Y3,Z3: A position in the positive Y direction of the X-Y plane in the plane
CAVSCFn(n=1 to 8) Specifies the valid/Invalid of checking for interference with the set free plane limit.
0:Invalid (default)
1: Valid
Note) The figure is an example of a vertical 6-axis robot.
In horizontal 4-axis robot is the same.
 Loading...
Loading...




