5Functions set with parameters
Hand and Workpiece Conditions (optimum acceleration/deceleration settings) 5-497
The coordinate axes used as references when setting the hand and workpiece conditions are shown below
for each robot model. The references of the coordinate axes are the same for both the hand and workpiece
conditions. Note that all the sizes are set in positive values.
*Vertical type
*Horizontal type
+Z
Definitions of Coordinate Axes
The tool coordinate is used for the coordinate axes.
Axes that must be set:
Only the X, Y and Z elements of the center of gravity and the X, Y
and Z elements of the size must be set.
+Y
+X
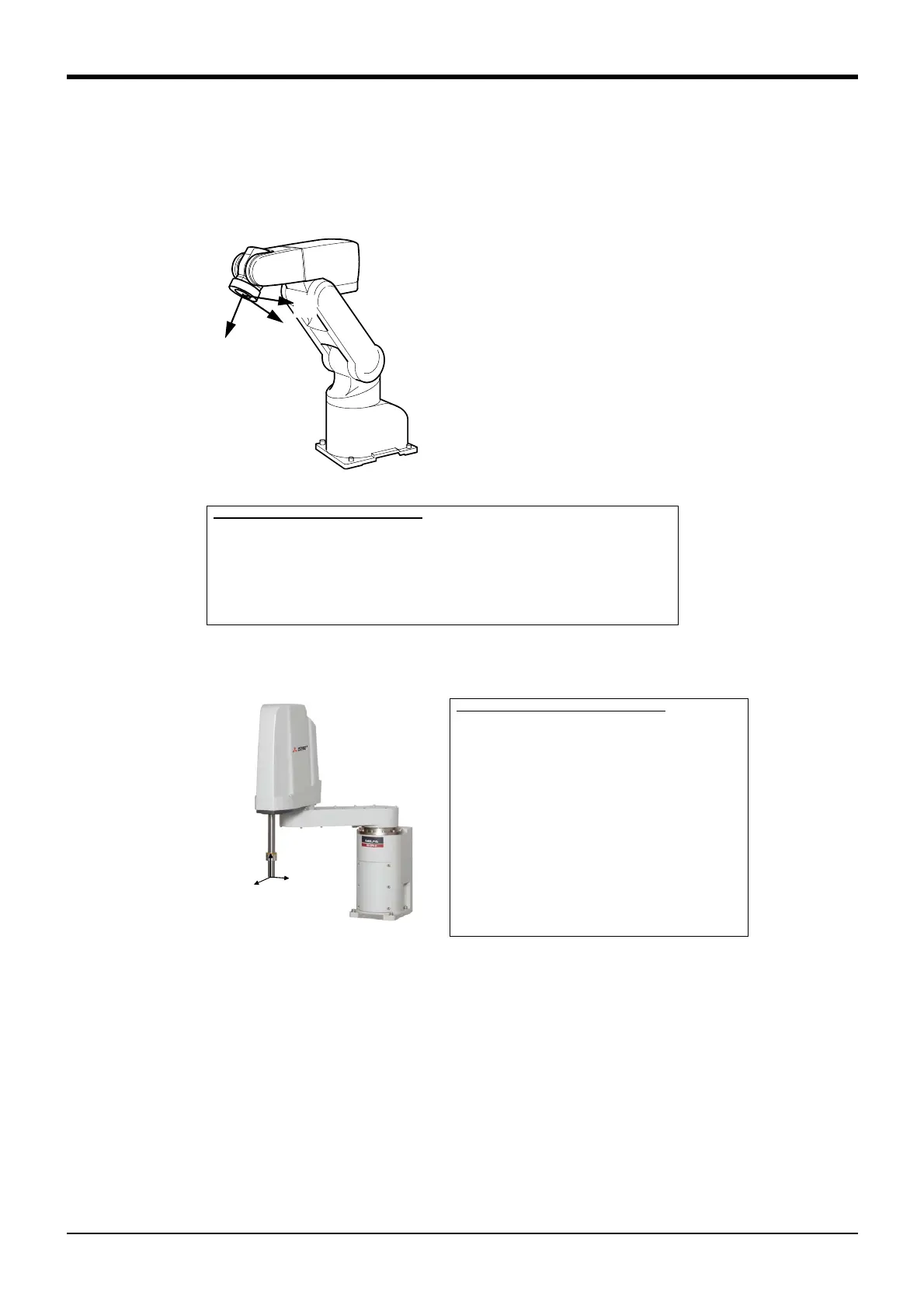
6-axis type
Definitions of Coordinate Axes
In the coordinate system with the tip of
the J4 axis as the origin:
Z axis: The upward direction is positive.
X axis: The direction of extension in the
arm orientation is positive.
Y axis: A right hand coordinate system
Axes that must be set:
Only the X element of the center of
gravity and the X and Y elements of the
size must be set.
 Loading...
Loading...




