6-538 Interference avoidance function
5Functions set with parameters
(2) Shared memory map
This section shows the memory map of the robot’s CPU output area in the shared memory, which is allo-
cated based on the parameter: IQMEM setting.
Fig.5-24:Shared memory map
Note 1) The robot cooperative control function address is fixed regardless of
the expanded function enable/disable state.
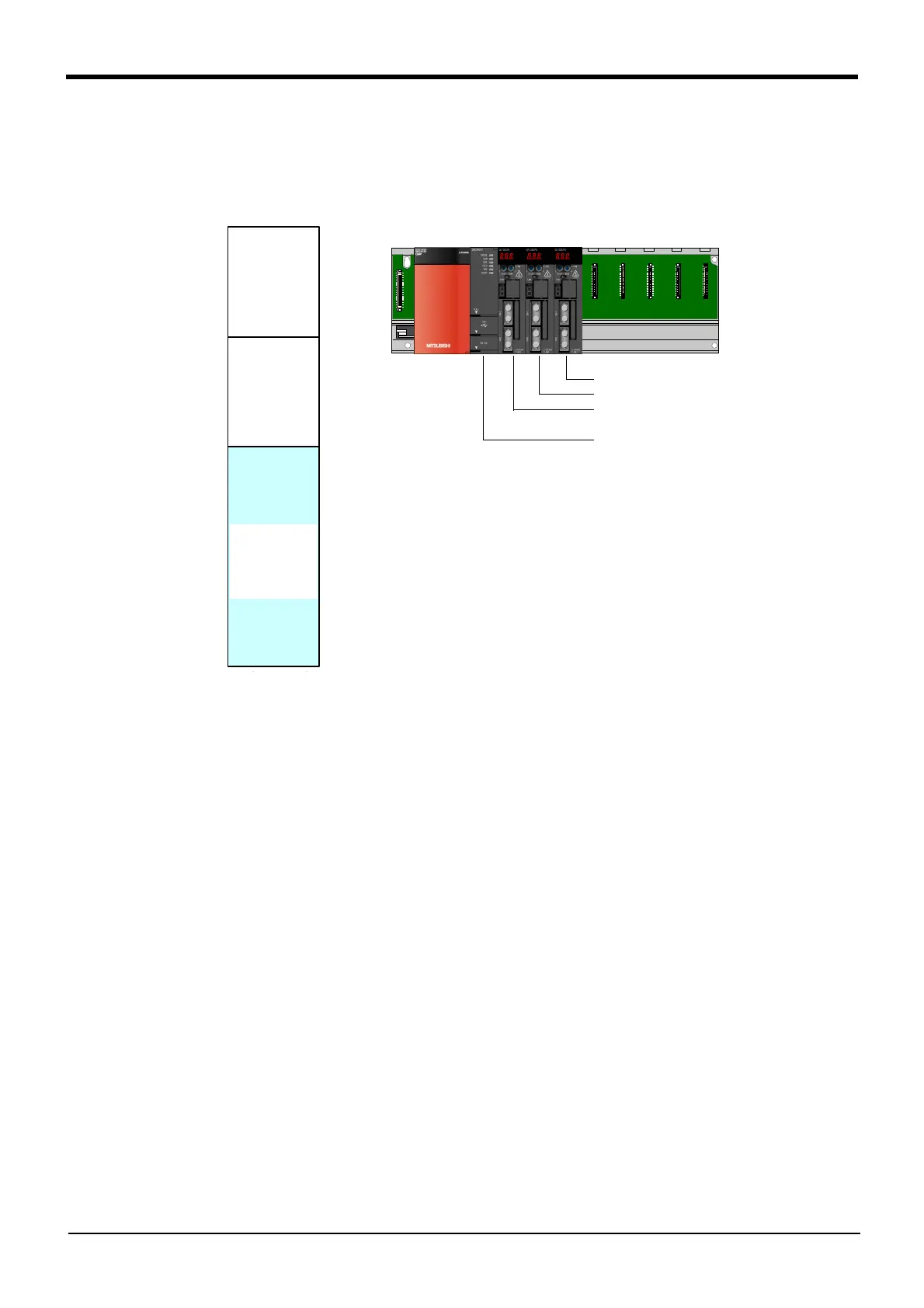
Note 2) “n” in U3En\ of the shared memory address corresponds to the robot
No. Each slot position in the robot CPU system (iQPlatform) has a
fixed robot No.
Module No. 4 = Robot No. 3
Module No. 3 = Robot No. 2
Module No. 2 = Robot No. 1
Module No. 1 = PLC CPU
Robot CPU system
Note 2)
Note 2)
<Shared memory map> <Relation of slot and robot number>
User area
(0.5k word)
Expanded
function area
(0.5k word)
Robot cooper-
ative control
function area
(1.0k word)
Note 1)
Total 2k words
U3En\G10512
U3En\G10000
U3En\G11024
U3En\G112047
 Loading...
Loading...




