7Appendix
Spline interpolation Appendix-667
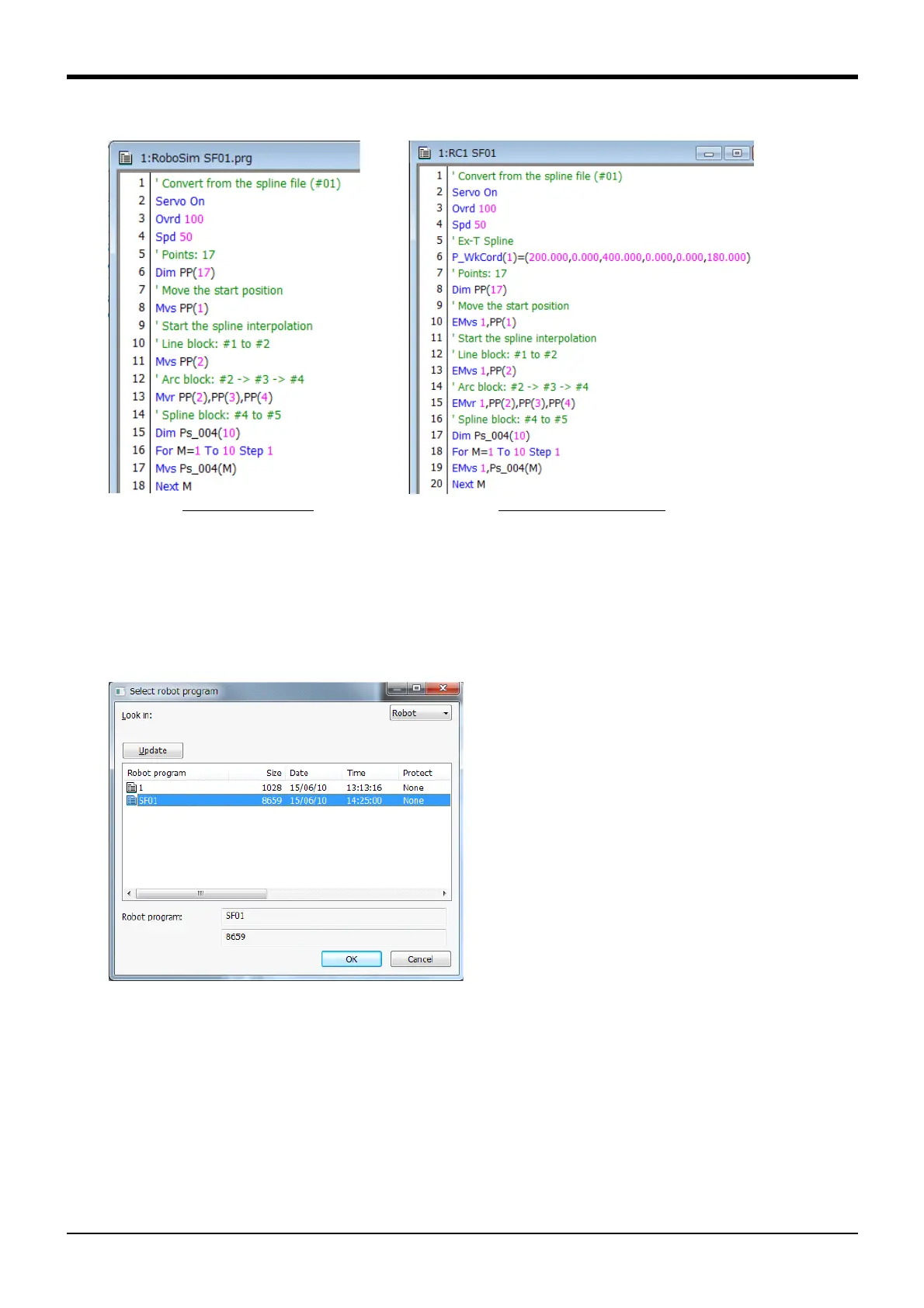
Fig.7-100:Program created by each interpolations
■Import position variables
Robot program position data can be imported as spline file path point data.
To use this function, the RT ToolBox2 version 3.40S or later is required.
By clicking [Tool] → [Robot program] → [Import position variables] on the menu, the selection screen for the
program to be imported to the active Spline editing screen appears.
Fig.7-101:Select robot program
By selecting the robot program for which position data is to be imported and clicking the [OK] button, posi-
tion data is imported to the active Spline editing screen.
* Position data that can be imported is PP (n) (n: path point number) or P* (*: path point number).
* If no path point corresponding to the active spline file exists, create new path points. (Default values are
used for other than position data.)
Spline interpolation Ex-T spline interpolation
 Loading...
Loading...




