7Appendix
Cooperative operation function Appendix-699
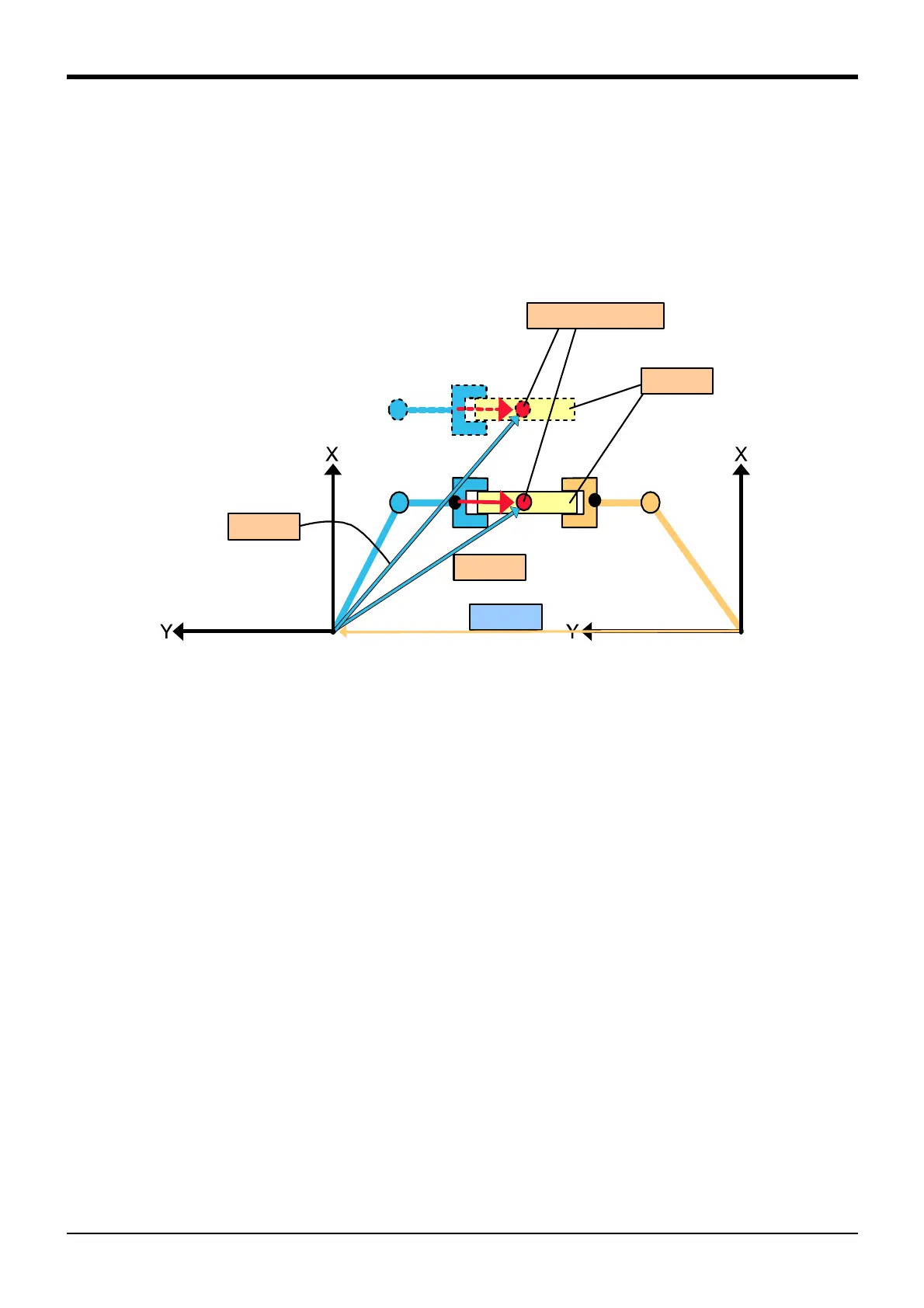
(3) Adjustment 3: Teaching and parameter setting of the workpiece transport destination
Use the robot program 1.prg for robot No.1 to teach the workpiece transport destination (to robot No.1 only).
Set the parameter to enable each extended function for robot No.1 and robot No.2.
■Outline of setting procedure
1) Teach the workpiece transport destination to robot No.1. (P1, P2)
2) Set the parameter to enable each extended function for robot No.1 and robot No.2.
(Change [1: 00000000000000000] to [1: 00000000000000011].)
Fig.7-123:Teaching and parameter setting of the workpiece transport destination
Common tool position
Workpiece
P1
P2
PBASE
Robot No.1
(Master)
Robot No.2
(Slave)
 Loading...
Loading...




