Startup Calibrate the robot system
SD-/SQ series 5 - 9
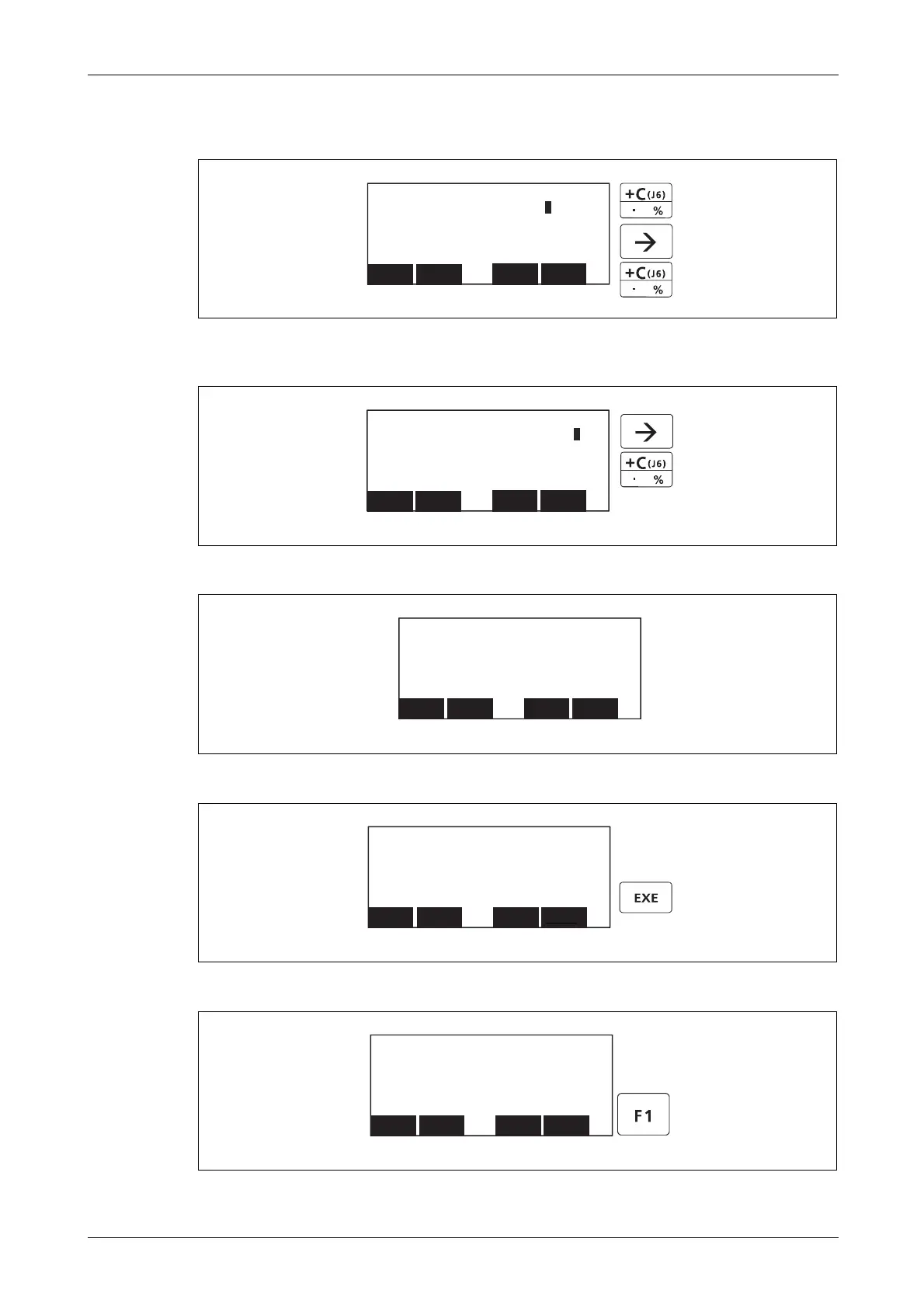
Enter "!". To do this, keep the [CHARACTER] key pressed and then press the [, %] key 5 times. A "!"
appears
Enter the remaining characters in the same way. Press the [
], key to move the cursor to the
data.entry position for the J1 articulated joint.
Data for the J1 to J2 articulated joints is entered in the same way as described above.
Press the [EXE] after entering all data. An acknowledgement screen pops up.
Press the [F1] key to complete the entry of the home position.
R001481E
R001482E
R001483E
R001484E
R001485E
,
,
<ORIGIN> DATA
D:(
V! )
J1( ) J2( ) J3( )
J4( ) J5( ) J6( )
J7( ) J8( )
CLOSE
123
<ORIGIN> DATA
D:(
V! %S29 )
J1( ) J2( ) J3( )
J4( ) J5( ) J6( )
J7( ) J8( )
CLOSE
123
,
:
:
<ORIGIN> DATA
D:(
V !%S29 )
J1( ) J2( ) J3( )
J4( ) J5( ) J6( )
J7( ) J8( )
CLOSE
123
<ORIGIN> DATA
D:(
V! %S29)
J1( 06DTYY) J2( 2?HL9X) J3( 1CP55V)
J4( T6!MSY) J5( Z21J%Z) J6( A12%Z0)
J7( ) J8( )
CLOSE
ABC
<ORIGIN> DATA
CHANGE TO ORIGIN. OK?
No
123
Yes
 Loading...
Loading...


