6.
PROGRAMMING
/MELSEC-A
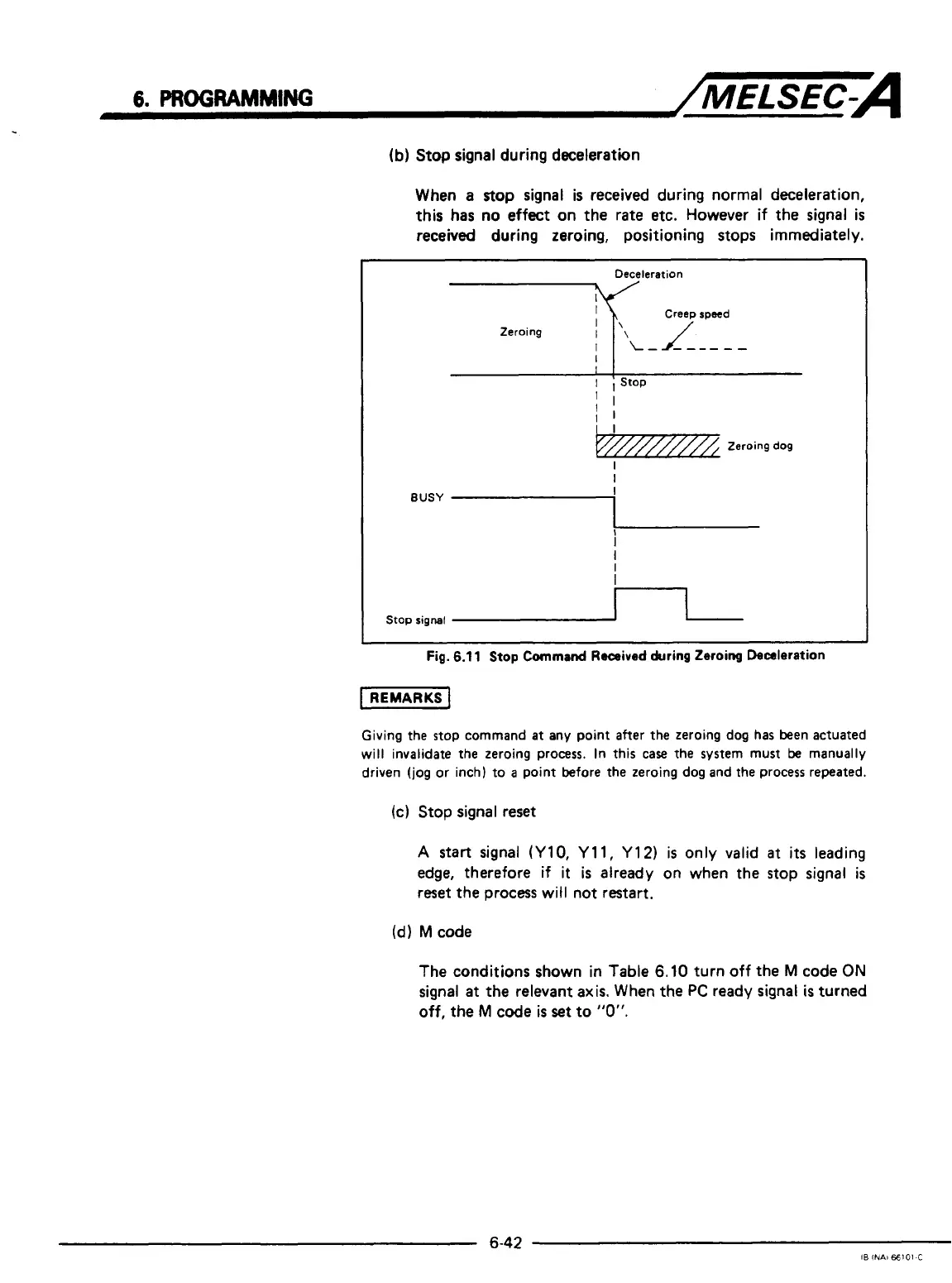
(b) Stop signal during deceleration
When
a
stop
signal
is
received during normal deceleration,
this has no effect on the rate
etc.
However if the signal
is
received during zeroing, positioning stops immediately.
Deceleration
I
Stop
signal
I
Fig.
6.1
1
Stop
Command
Received
during
Zeroing Deceleration
Giving the stop command at any point after the zeroing dog has been actuated
will invalidate the zeroing process. In this case the system must be manually
driven (jog
or
inch) to
a
point before the zeroing dog and the process repeated.
(c)
Stop signal reset
A
start
signal (Y10, Y 11, Y12) is only valid
at
its
leading
edge, therefore
if
it
is
already on when the stop signal
is
reset the process will not restart.
(dl
M
code
The conditions shown in Table
6.10
turn off the
M
code
ON
signal
at
the relevant
axis.
When the
PC
ready signal
is
turned
off, the
M
code
is
set
to
"0".
6-42
IE
INAl
€6101-C
 Loading...
Loading...





