3.
SPECIFKAT1ONS
~/MELSEC-A
3.2.2
Functions
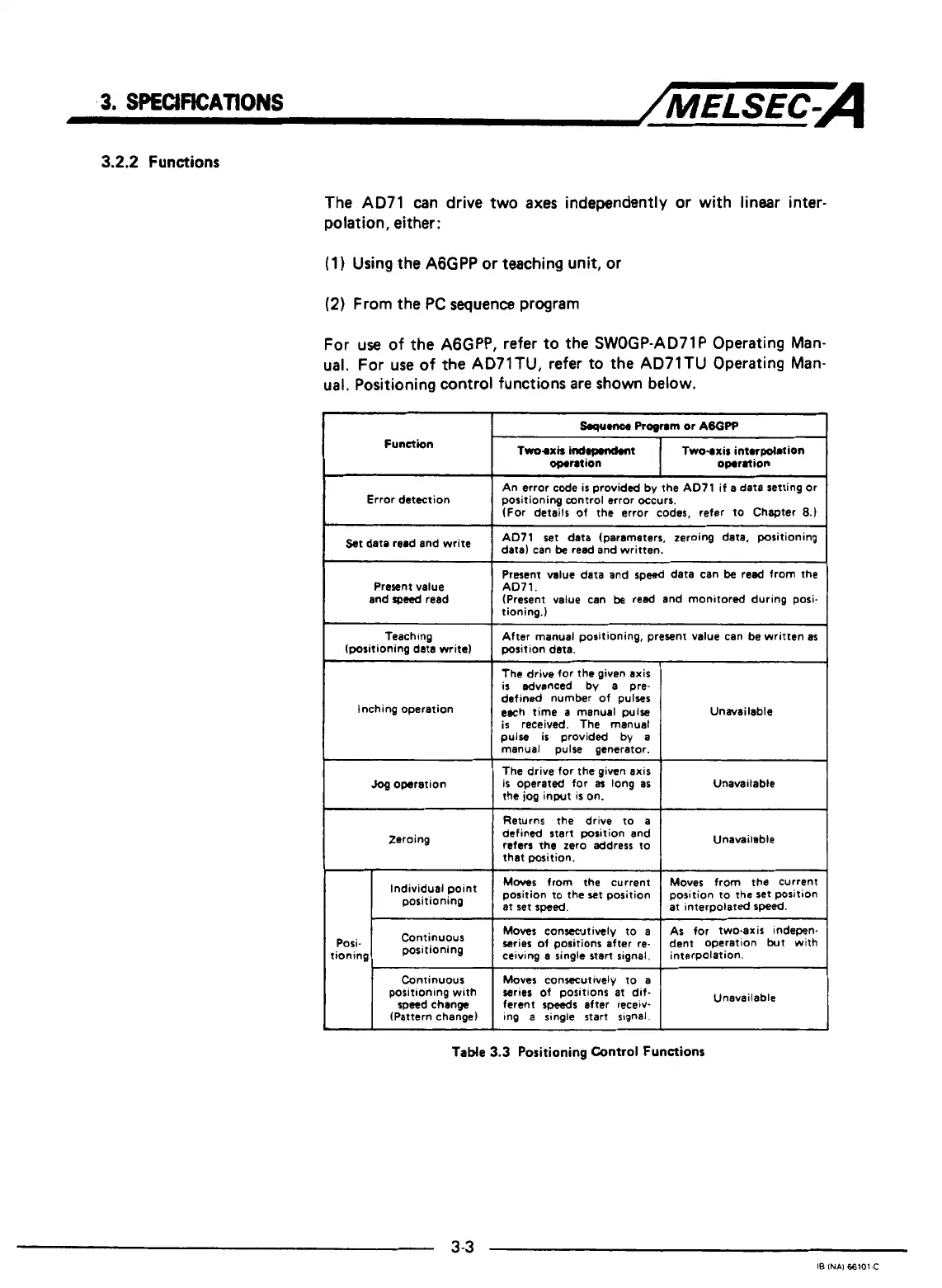
The AD71 can drive two axes independently or with linear inter-
polation, either:
(1)
Using the AGGPP
or
teaching unit, or
(2)
From the PC sequence program
For
use
of the AGGPP, refer to the SWOGP-AD71P Operating Man-
ual. For use of
the
AD71TU, refer to the AD71TU Operating Man-
ual. Positioning control functions are
shown
below.
~~
Squmce
Progrm
or
ABOPP
Function
Trm-axir
indopmndmt
omntion
Two-axir intorpolation
omration
Error detection
~~
An error code
is
provided by the AD71 if a data setting or
positioning control error occurs.
(For details of the error codes, refer to Chapter
8.)
I
st
date
and
write
data) can
be
read and written.
AD71 set data (parameters, zeroing data, positioning
and
speed
read
Present value
Present value data and
speed
data can
be
read from
the
AD71.
(Present value can
be
reed and monitored during posi.
tioning.)
~~~ ~~
Teaching
(positioning data mite)
position data.
After manual positioning, present value can be written as
The
drive for the given axis
is
advanced by a pre-
Inching operation
defined number
of
pulses
each time a manual pulse
Unavailable
is
received. The manual
pulse
is
provided by
a
manual pulse generator.
Jog
operation
The drive for the given axis
is
operated for
a~
long
as
Unavailable
the
jog
input
is
on.
1
Returns the drive to a
I
Zeroing
I
defined start position and
refers the zero address to
I
Unavailable
that position.
point
position to the set position
position to the set position
positioning
Moves from the current
Moves
from
the
current
at
set
speed.
at interDolated
speed.
tioning
Posi-
Continuous
positioning
positionlng with
Continuous
(Pattern change)
speed change
series of positions
at
dif-
ferent
speeds
after recetv-
Ing
a single start slgnal.
Unavailable
TaMe
3.3
Positioning
Control
Functions
.
3
-3
I8
INAI
66101-C
 Loading...
Loading...





