SECTION FIVE – COMPONENT DESCRIPTION
DS2000 USER’S MANUAL (rev.C)
5.8
LPF filters on the reference and on the speed error allow to adapt the servosystem (drive
+ motor) pass band to the application characteristics.
The Notch filter allows to eliminate or reduce any eventual oscillation on the machine
mechanics be-cause of the limited rigidity of the motor transmission parts (mechanical
transmissions, belts, etc.), specially in presence of high inertia ratios between motor and
load (mismatching load condition).
5.4.1.1.1 LOW AND HIGH SPEED OPERATION
Current control loop has two different working conditions: Low speed and High speed.
The difference is determined by motor voltage with respect to the available output
voltage on motor phases.
At low speed, the voltage supplied by the drive is higher than the one generated by the
motor, and the field generated by current is in phase with the field generated by
magnets.
At high speed, the motor voltage can be compared to the voltage available from the
drive; the relevant phase between the magnetic fields is automatically changed in order
to keep such a voltage margin as to allow an optimal current adjustment.
This algorithm allows an optimal exploitation of motor characteristics, supplying the
same peak torque both at low and high speed, with a higher peak power available for
machinery motion.
It is also possible to wind the motors with a higher torque constant; thanks to this
feature, in many applications, it is possible to use a drive supplying a lower current to
obtain the same peak torque at motor output.
All the motors produced by Moog, are provided with this feature and give high
performances at high rotation speed.
An additional phase shift is given by the G motors Algorithm, suggested mainly for
motors having high poles number (8 or 12) and running at speed over 3000 rpm.
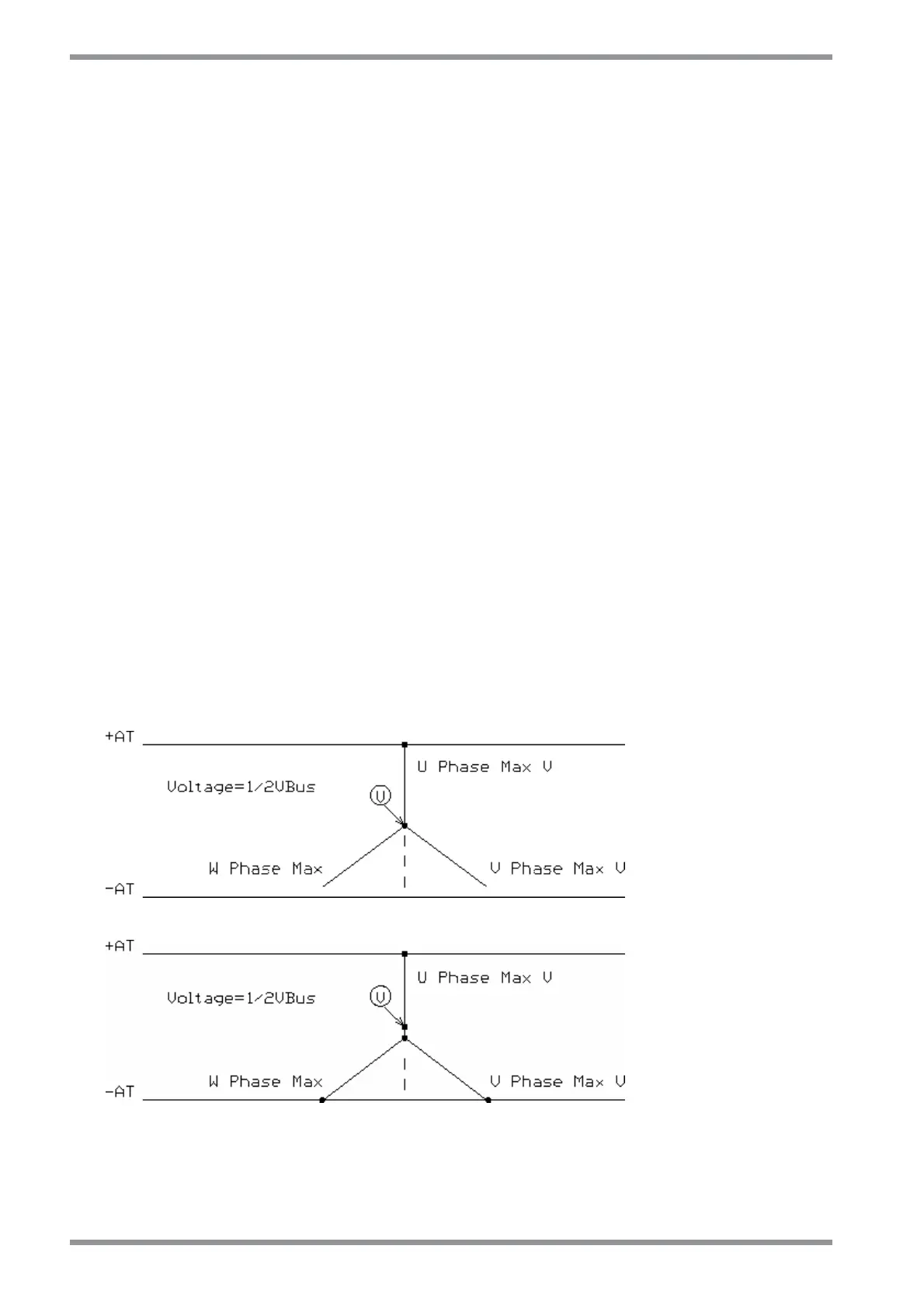
Standard Drive
Phase max V=1/2
Vbus
DS2000 Drive
Phase max V>1/2
Vbus