SECTION ONE – DESCRIPTION
DS2000 USER’S MANUAL (rev.C)
1.3
ADVANCED PERFORMANCE:
• The current loop, based on a traditional PI structure, is provided with automatic
compensation algorithms of the EMF and of the KP/KI ratio, as a function of the motor
characteristics.
• Hardware calibrations are not necessary for the current loop, but they are necessary
for parameters setting.
• Current loops are closed at 10kHz.
• The speed loop is closed at 5kHz.
• Additional phase advance is provided.
1.4 TECHNICAL DATA
1.4.1 ELECTRICAL AND MECHANICAL SPECIFICATIONS
Three-phase input voltage rating: 230V
ac
to 460V
ac
±10%, 50/60 Hz
Min/max Three-phase input voltage
- With 24 V
dc
auxiliary input voltage: 65 / 510 V
ac
(DC-BUS: 80 / 720 V
dc
)
- Without 24 V
dc
auxiliary input voltage: 120 / 510 V
ac
(DC-BUS: 150 / 720 V
dc
)
Auxiliary voltage: 24 V
dc
±10% , 1.5A
Configurable analog references: 3.2 to 10 V
dc
Max dynamic with encoder: 200 Hz
Switching frequency: 10 kHz
Speed adjustment: 0 to 9999 rpm
Anti-resonance low-pass filter: 20 to 800 Hz
Filter on reference: 1 to 800 Hz
Notch filter (programmable): 50 to 1500 Hz
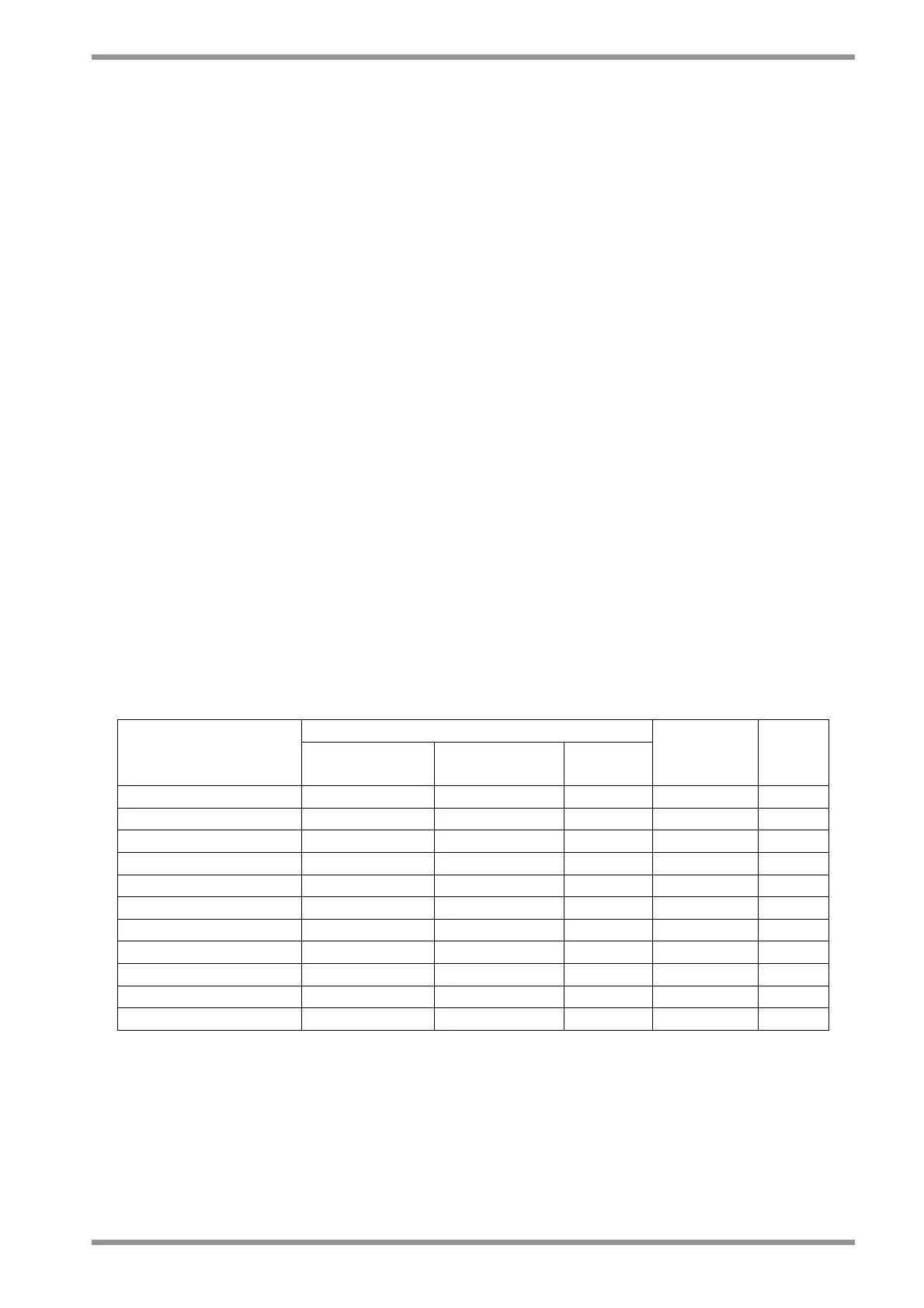
Output current
Model
Nominal
(A
rms
)
Max
(A
rms
)
Peak
(A)
Mass
(kg)
Size
3/9 3 6.4 9 4.5 A
4/12 4 8.5 12 4.5 A
6/15 6 10.6 15 4.5 A
8/22 8 15.6 22 4.5 A
14/42 14 29.7 42 6 B
20/45 20 31.8 45 10 C
25/70 25 49.5 70 10 C
30/90 30 63.6 90 10 C
50/140 50 99.0 140 23 D
60/180 60 127.3 180 23 D
100/300 100 212.7 300 40 E
Tab. 1.0 – Mechanical and electrical characteristics