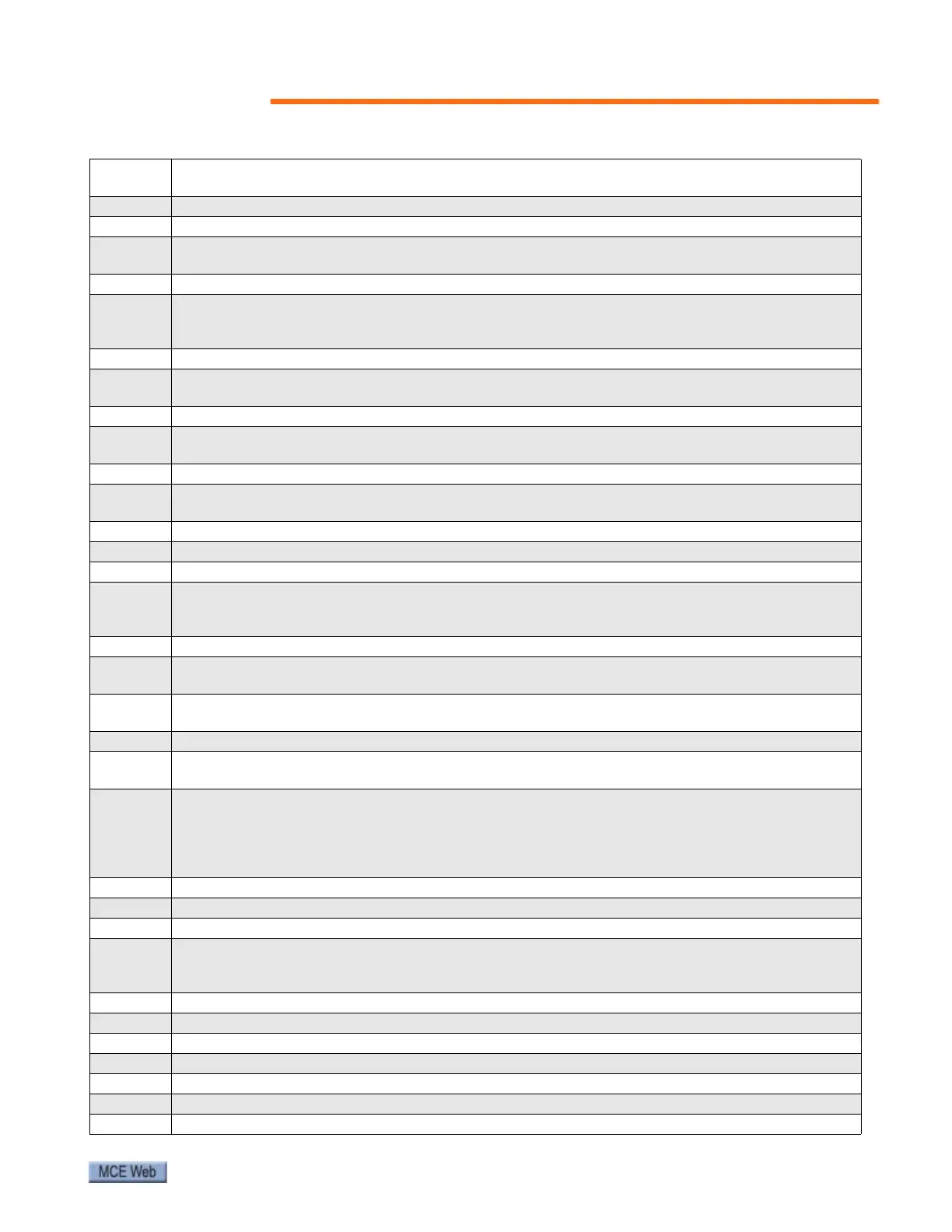
Fault Conditions
55
EEF
EEPROM data corrupted - Drive mode becomes open loop and serial comms will time out with
remote keypad on the drive RS485 comms port.
31 This trip can only be cleared by loading default parameters and saving parameters
EnC1 Drive encoder trip: Encoder power supply overload
189
Check encoder power supply wiring and encoder current requirement. Maximum current =
200mA @ 15V, or 300mA @ 8V and 5V
EnC2 Drive encoder trip: Wire break
190
Check cable continuity Check wiring of feedback signals is correct Check encoder power is set
correctly Replace feedback device If wire break detection on the main drive encoder input is not
required, set Pr 3.40 = 0 to disable the EnC2 trip
EnC3 Drive encoder trip: UVW phase offset incorrect whilst running
191
Check the encoder signal for noise Check encoder shielding Check the integrity of the encoder
mechanical mounting Repeat the offset measurement test
EnC4 Drive encoder trip: Feedback device comms failure
192
Ensure encoder power supply is correct Ensure baud rate is correct Check encoder wiring Replace
feedback device
EnC5 Drive encoder trip: Checksum or CRC error
193
Check the encoder signal for noise Check the encoder cable shielding With EnDat encoders, check
the comms resolution and/or carry out the auto-configuration Pr 3.41
EnC6 Drive encoder trip: Encoder has indicated an error
194 Replace feedback device With SSI encoders, check the wiring and encoder supply setting
EnC7 Drive encoder trip: Initialization failed
195
Re-set the drive Check the correct encoder type is entered into Pr 3.38 Check encoder wiring
Check encoder power supply is set correctly Carry out the auto-configuration Pr 3.41 Replace
feedback device
EnC8 Drive encoder trip: Auto configuration on power up has been requested and failed
196
Change the setting of Pr 3.41 to 0 and manually enter the drive encoder turns (Pr 3.33) and the
equivalent number of lines per revolution (Pr 3.34) Check the comms resolution
EnC9
Drive encoder trip: Position feedback selected is selected from a Solutions Module slot which does
not have a speed / position feedback Solutions Module fitted
197 Check setting of Pr 3.26 (or Pr 21.21 if the second motor parameters have been enabled)
EnC10
Drive encoder trip: Servo mode phasing failure because encoder phase angle (Pr 3.25 or Pr
21.20) is incorrect
198
Check the encoder wiring. Perform an autotune to measure the encoder phase angle or manually
enter the correct phase angle into Pr 3.25 (or Pr 21.20). Spurious EnC10 trips can be seen in
very dynamic applications. This trip can be disabled by setting the speed threshold in Pr 3.08 to
a value greater than zero. Caution should be used in setting the over speed threshold level as a
value which is too large may mean that an encoder fault will not be detected.
ENP.Er Data error from electronic nameplate stored in selected position feedback device
176 Replace feedback device
Et External trip from input on terminal 31
6
Check terminal 31 signal Check value of Pr 10.32 Enter 12001 in Pr xx.00 and check for parame-
ter controlling Pr 10.32 Ensure Pr 10.32 or Pr 10.38 (=6) are not being controlled by serial
comms
HF01 Data processing error: CPU address error
Hardware fault - return drive to supplier
HF02 Data processing error: DMAC address error
Hardware fault - return drive to supplier
HF03 Data processing error: Illegal instruction
Hardware fault - return drive to supplier
HF04 Data processing error: Illegal slot instruction
Table 20. CT Drive Fault Displays