5.2 Robot Control Function
5-10
<Example>
Command RPOSC 2, 0
Response 100.0, 50, 34, 12.34, 180.0, 0, 0, 0, 0, 0, 0
RSTATS
Reads the status of mode, cycle, operation, alarm error, and servo.
Command format : RSTATS
Response format : Data-1, Data-2 or Error code
<Example>
Command RSTATS
Response 1, 0
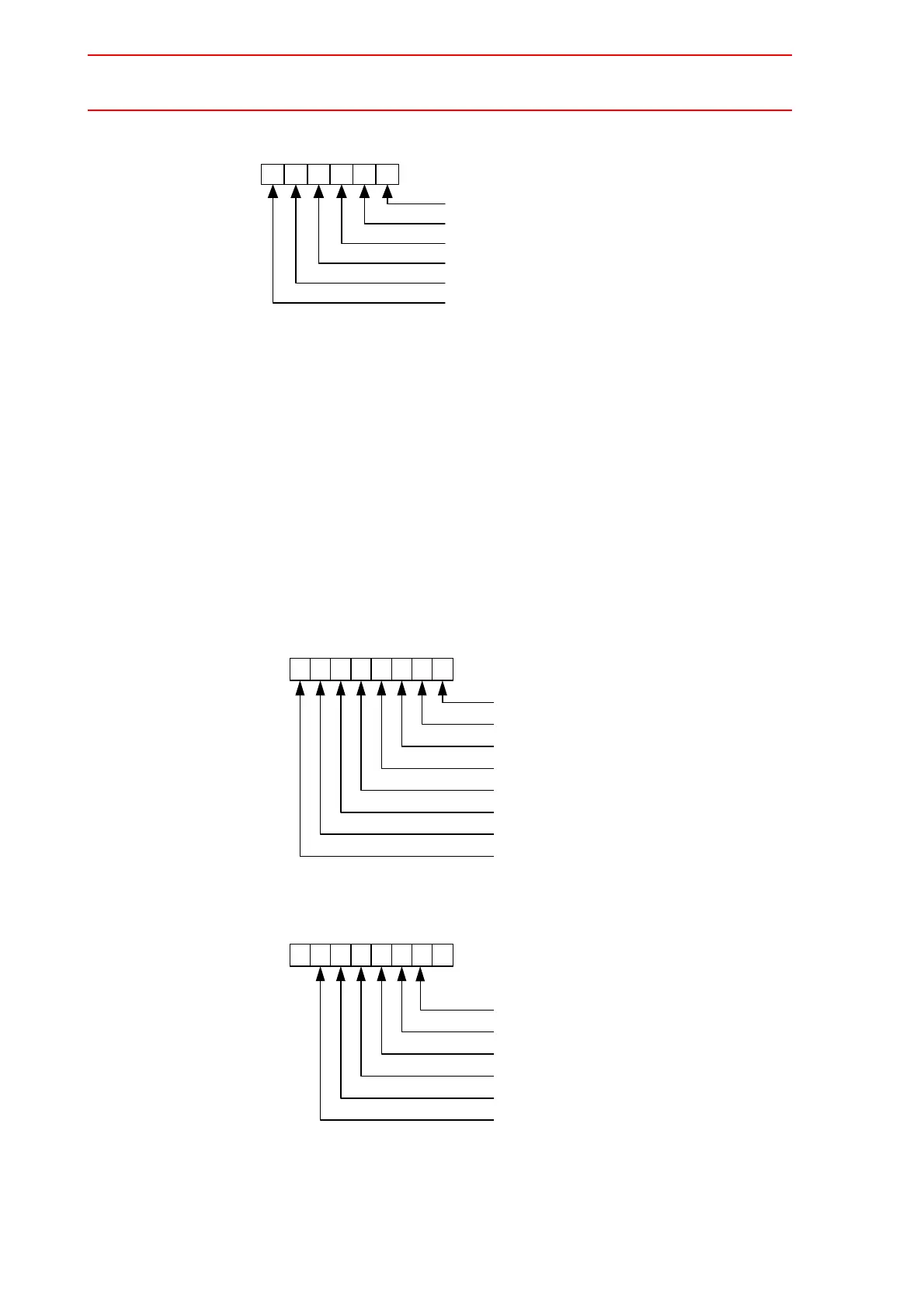
D5
0 : Flip 1 : No flip
0 : Upper arm 1 : Lower arm
0 : Front 1 : Back
0 : R<180 1 : R>=180
0 : T<180 1 : T>=180
0 : S<180 1 : S>=180
D4 D3 D2 D1 D0
MSB
Data-1
LSB
Step
1 cycle
Auto
Running
Safety speed operation
Teach
Play
Command remote
MSB
Data-2
LSB
Hold (parogramming pendant)
Hold (external)
Hold (command)
Alarm occuring
Error occuring
Servo ON

 Loading...
Loading...


