5.2 Robot Control Function
5-21
Response format : 0000 or Error code
<Example>
Command CGROUP 2, 1
Response 0000
In the above example with two manipulators, robot 2 and station 1 are validated. By issuing
RPOS after this command is issued, the current positions of robot 2 and station 1 can be read.
CTASK (Optional)
Changes the task for control in the host control function.
When the power supply is started up or in a system where an independent control is not
allowed, this command is to be used as follows.
For details, refer to Section 5.3 “Commands for Multi-control Group and Independent Control
Functions”.
• When the power supply is started up, a master task is selected as an task to be con-
trolled.
• CTASK cannot be used in a system where an independent control is not allowed.
Command format : CTASK Data-1
Data-1 = Specified task
0 : Master task
1 : Sub 1 task
2 : Sub 2 task
3 : Sub 3 task
4 : Sub 4 task
5 : Sub 5 task
6 : Sub 6 task
7 : Sub 7 task
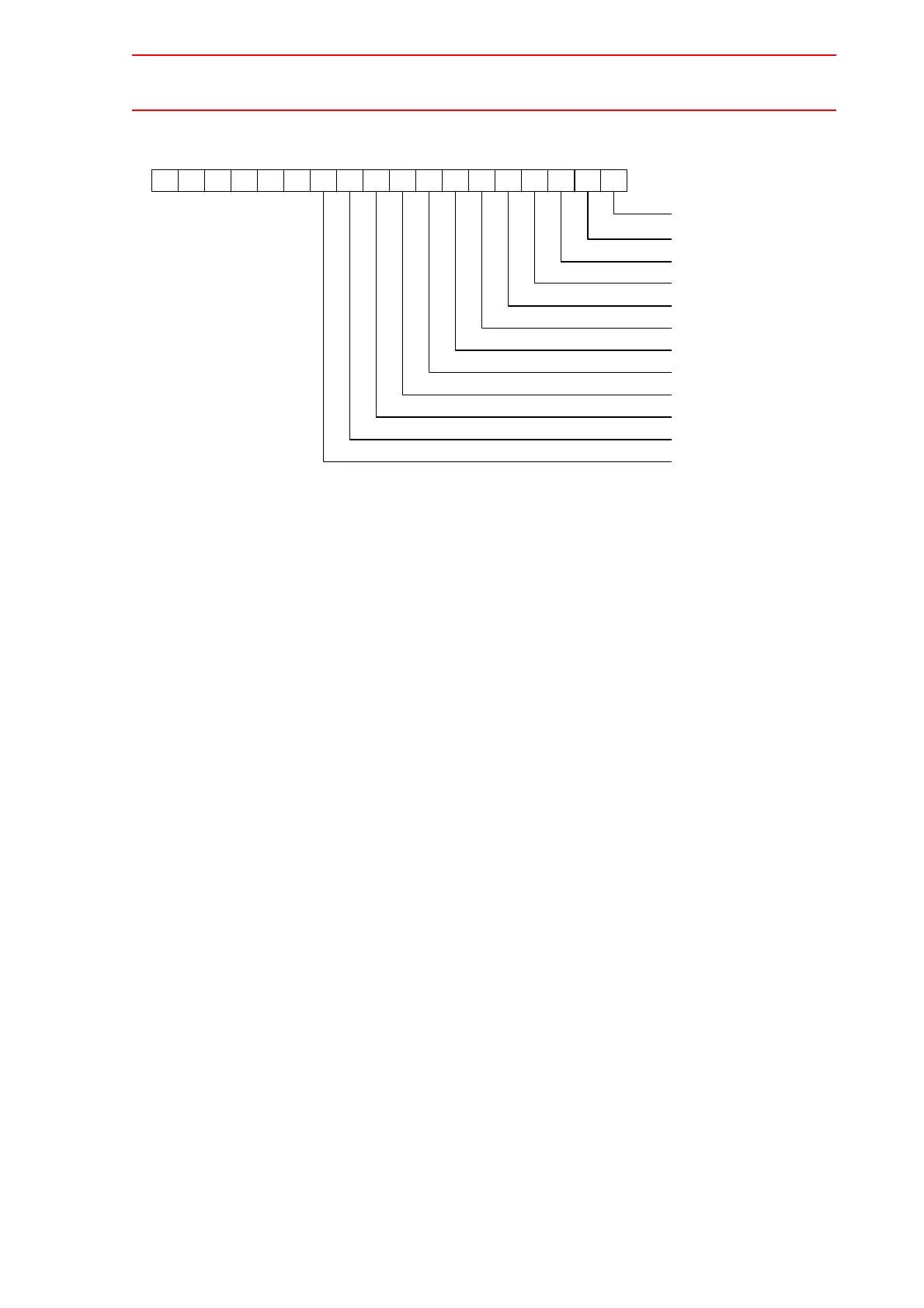
D00
S1: Station 1
S2: Station 2
S3: Station 3
S4: Station 4
S5: Station 5
S6: Station 6
S7: Station 7
S8: Station 8
S9: Station 9
S10: Station 10
S11: Station 11
S12: Station 12
D01D02D03D04D05D06D15 d07D08D09D10D11D12D13D14 D06

 Loading...
Loading...


