English – 21
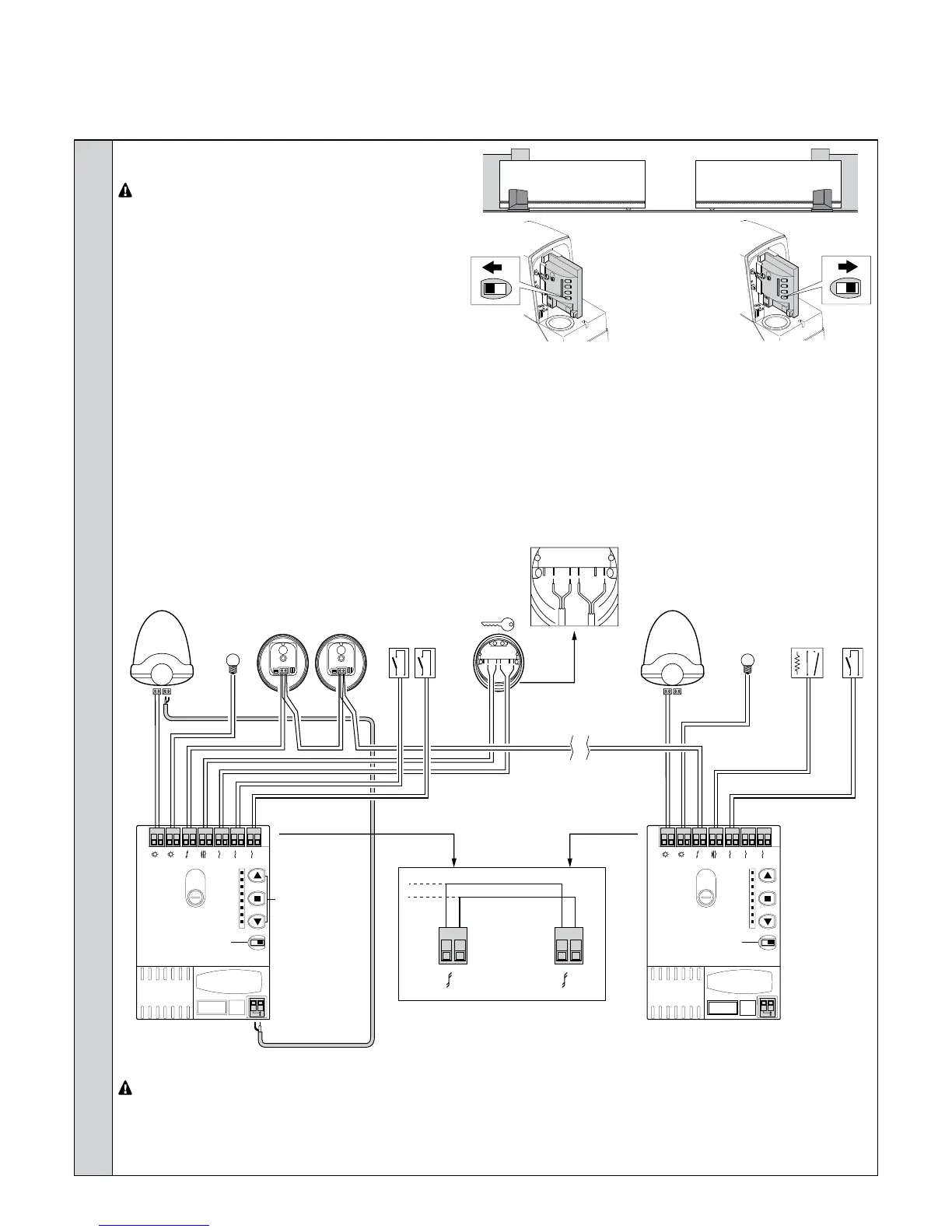
8.3 - ROBUS in “Slave” mode
When properly programmed and connected, ROBUS can function in “Slave” mode; this type of function is used when 2 opposing gate leaves
must be automated with the synchronised movement of the two gate leaves. In this mode, one ROBUS functions as a Master commanding
the movement, while the second ROBUS functions as a Slave, by executing the commands transmitted by the Master (all ROBUS devices are
factory-set to operate as Masters).
To congure ROBUS as Slave, one “Slave Mode” Level 1 function must be activated (see Table 5).
01. The connection between ROBUS Master and ROBUS Slave
is made via BLUEBUS.
In this case the polarity of the connections between the
two ROBUS devices must be respected, as illustrated in the
gure (the other devices continue not having polarity)
Follow the operations below to install 2 ROBUS devices in
Master and Slave mode:
- Install the 2 motors
It is not important which motor must function as Slave or Master; the choice must take into account the convenience of the connections
and the fact that the Step-by-Step command of the Slave only allows the Slave leaf to be opened fully
- Connect the 2 motors
- Select the direction of the opening manoeuvre of the 2 motors (Figures 5-6)
- Power the 2 motors
- Programme the “Slave Mode” function on the Slave ROBUS (see Table 5)
- Run the device recognition on the Slave ROBUS (see Paragraph 7.6 “Recognition of devices”)
- Run the device recognition on the Master ROBUS (see Paragraph 7.6 “Recognition of devices”)
- Run the gate leaf length recognition on the Master ROBUS (see Paragraph 7.7 “Gate leaf length recognition”)
L1
L2
L3
L4
L5
L6
L7
L8
Fuse 1.6 A
Receiver
TX
24V 4W
S.C.AFLASH
RX
NC NO CC NO NC
KEYS
SELECTOR
LED
AERIAL
L1
L2
L3
L4
L5
L6
L7
L8
Fuse 1.6 A
Receiver
24V 4W
FLASH
SELECTOR
LED
AERIAL
Flash
SCA
Bluebus
Stop
PP
Open
Close
Bluebus
Bluebus
CLOSE
2121
OPEN
Flash
SCA
Bluebus
Stop
PP
Open
Close
When connecting 2 ROBUS devices in Master-Slave mode, make sure that:
- All devices must be connected to the Master ROBUS, including the radio receiver.
- When using back-up batteries, each motor must have its own battery.
- All programming activities performed on the Slave ROBUS are ignored (those on Master ROBUS override the others)
except for those mentioned in Table 11.