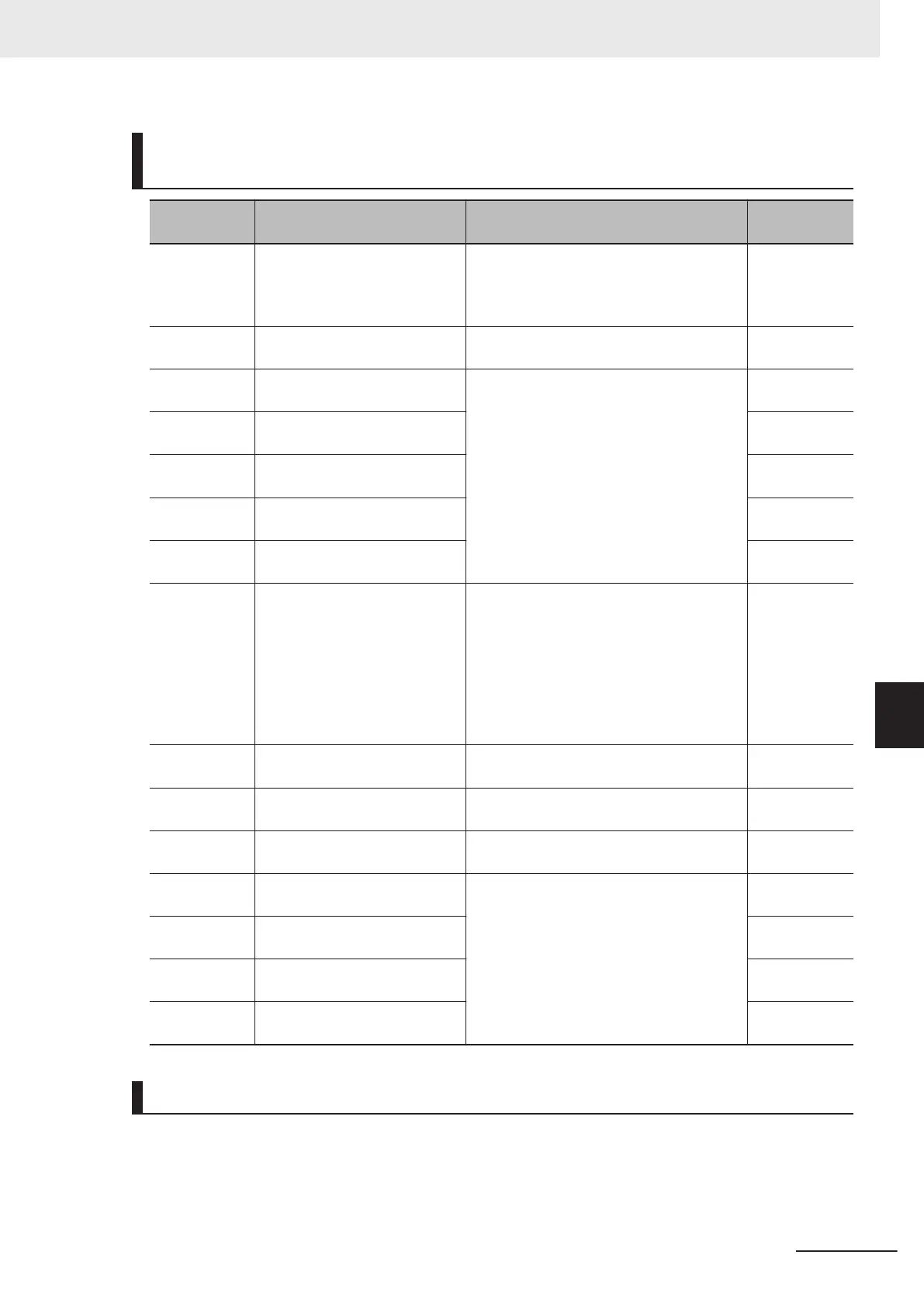
Vector Control (With/without Speed Sensor) (PM: Synchronous Mo-
tor)
Parameter
No.
Function name Set data Default data
3004Hex-2BH
ex
1st Drive Control Selection
15: PM Vector control without speed and
pole position sensor
16: PM Vector control with speed and pole
position sensor
0
3004Hex-1BH
ex
Carrier Frequency Motor specification 2kHz
3004Hex-05H
ex
1st Base Frequency
Motor rated value
50.0Hz
3004Hex-06H
ex
1st Rated V
oltage at Base Fre-
quency
Dependent on
capacity
3007Hex-02H
ex
1st Motor Pole Number 4
3007Hex-03H
ex
1st Motor Capacity
Dependent on
capacity
3007Hex-04H
ex
1st Motor Rated Current
Dependent on
capacity
3007Hex-1FH
ex
1st PM Motor Starting Method
0: Pull-in by current
1: For IPM type 1(Interior permanent mag-
net synchronous motor)
2: For SPM type (Surface permanent mag-
net synchronous motor)
3: Pull-in by current for IPM type
4: For IPM type 2(Interior permanent mag-
net synchronous motor)
1
3007Hex-40H
ex
1st PM Motor Induced Voltage
Ke
When unknown, perform rotation tuning.
Dependent on
capacity
3007Hex-41H
ex
1st PM Motor Iron Loss When unknown, set 0%.
Dependent on
capacity
3007Hex-5BH
ex
1st PM Motor Overcurrent Pro-
tection Level
When unknown, set 2x the rated current.
Dependent on
capacity
3004Hex-04H
ex
1st Maximum Output Frequen-
cy
Design specification value
60.0Hz
3004Hex-10H
ex
1st Frequency Upper Limit 70.0Hz
3004Hex-08H
ex
1st Acceleration Time 1 6.0 s
3004Hex-09H
ex
1st Deceleration Time 1
6.0 s
When Control with Speed Sensor Is Selected as Control Method
When a control with speed sensor is selected as the control method, the following parameters match-
ed to the encoder specifications are required.
7 Vector Control and Applied Functions
7-9
M1 Series EtherCAT Type User’s Manual (I670)
7-1 Details of Motor Control Methods
7
7-1-3 Motor Parameter Settings
 Loading...
Loading...


