1st Motor Parameter %R1
(3007Hex-08Hex)/2nd Motor Motor Constant
%R1 (3009Hex-16Hex)
: Set the wiring resistance value on the primary side of
the motor for one phase in a Y-connection as a percent-
age Ohmic drop. Calculate by the following formula.
%R1=
× 10
0 (%)
R1 + Cable R1
V/(√3 × I)
R1: Motor primary resistance (Ω)
Cable R1: Resistance value c of output side cable
V: Motor rated voltage (V)
I: Motor rated current (A)
1st Motor Parameter %X
(3007Hex-09Hex)/2nd Motor Motor Constant
%X (3009Hex-17Hex)
:
Set the leakage inductance for one phase in a Y-con-
nection motor as a percentage reactance drop. Calcu-
late by the following formula.
%X =
× 10
0 (%)
X1 + X2 × XM/(X2+XM) + Cable X
V/(√3 × I)
X1: Motor primary leakage reactance (Ω)
X2: Motor secondary leakage reactance (primary con-
verted value)
XM: Motor excitation reactance (Ω)
Cable X: Reactance of output side cable (
Ω)
V: Motor rated voltage (V)
I: Motor rated current (A)
1st Rated Slip Frequency
(3007Hex-0DHex)/2nd Rated Slip Frequency
(3009Hex-1BHex)
: Set the rated slip frequency in a Y-connection motor as
Hz.
• After setting each motor parameter, adjust the parameters according to 7-3-3 Adjustments for Sen-
sorless Vector Control on page 7-
18.
• To increase response, increase the setting of Speed Control 1 P Proportional Gain
(3014Hex-04Hex)/Speed Control 2 P Proportional Gain (3009Hex-2EHex), and decrease the setting
if motor hunting occurs.
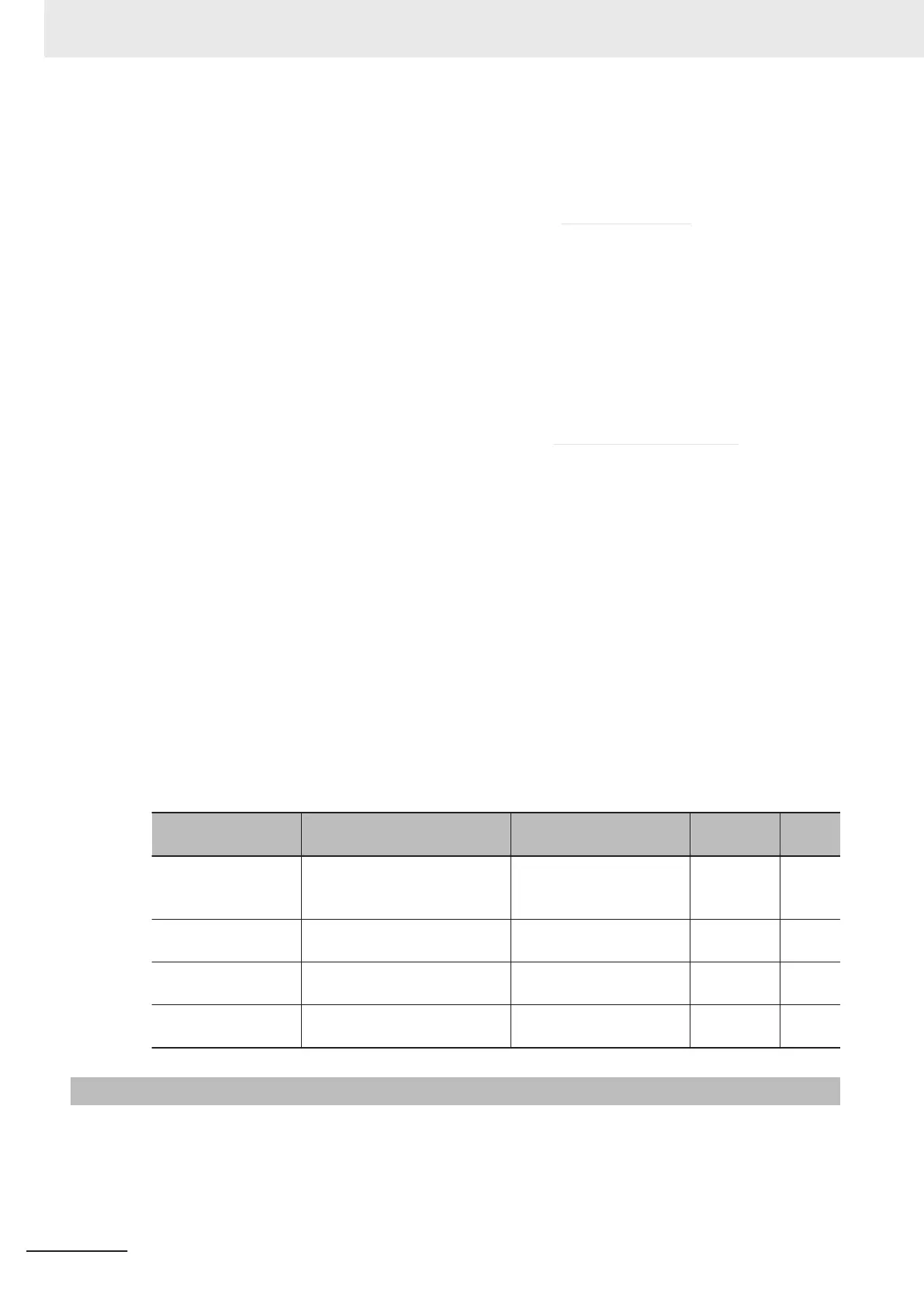
Parameter No. Function name Data
Default da-
ta
Unit
3007Hex-07Hex/
3009Hex-15Hex
1st Motor Armature Resist-
ance/2nd Motor Armature Re-
sistance
0.00 to 500.0 A
10.55 A
3007Hex-08Hex/
3009Hex-16Hex
1st Motor Parameter %R1/2nd
Motor Motor Constant %R1
0.00 to 50.00 %
3.17 %
3007Hex-09Hex/
3009Hex-17Hex
1st Motor Parameter %X/2nd
Motor Motor Constant %X
0.00 to 50.00 %
11.47 %
3007Hex-0DHex/
3009Hex-1BHex
1st Rated Slip Frequency/2nd
Rated Slip Frequency
0.00 to 15.00 Hz
1.00 Hz
7-3-3
Adjustments for Sensorless Vector Control
• To use sensorless vector control, perform offline auto-tuning.
If of
fline auto-tuning cannot be performed, set the parameters of the motor in use according to
7-3-2 Motor Parameter Settings
on page 7-17.
7 Vector Control and Applied Functions
7-18
M1 Series EtherCAT Type User’s Manual (I670)