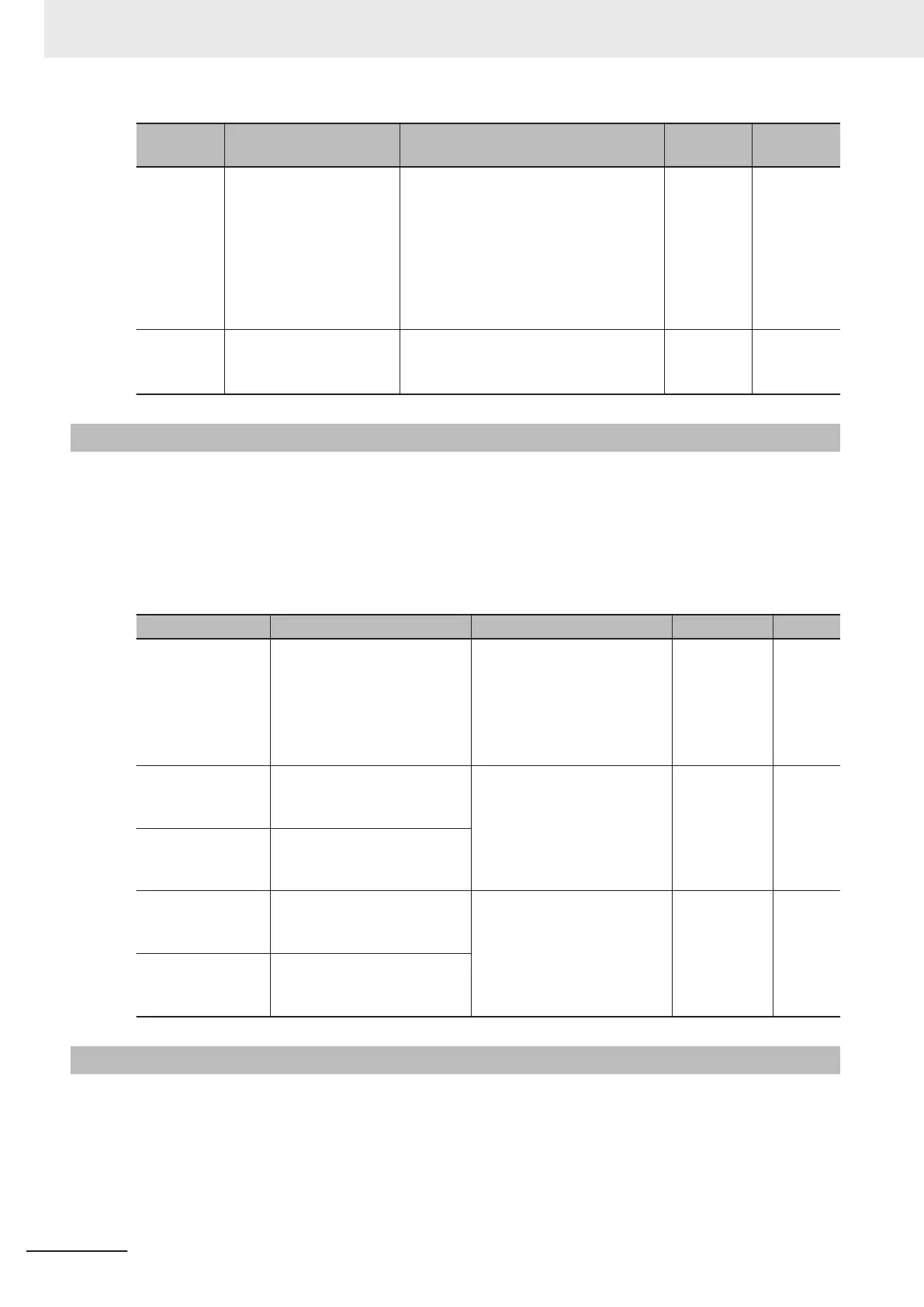
Parameter
No.
Function name Data
Default da-
ta
Unit
3005Hex-0
2Hex to
3005Hex-0
6Hex
3005Hex-6
3Hex
3005Hex-6
4Hex
Input Terminal [DI1] to
[DI7] Function Selection
139 (1139): Forward rotation driving pro-
hibited “FOT”
- -
140 (1140): Reverse rotation driving pro-
hibited “ROT”
3037Hex-5
1Hex
Over Travel Forced Stop
Operation Selection
0: Servo lock after deceleration stop
0 -
1: Operation error (alarm code: 24) after
a deceleration stop
7-7-7
Software OT
With overtravel (OT), the movement limit point is basically detected by the hardware. However, the lim-
it point position can be set by number of pulses as a software OT
. The limit point position can be set in
two directions independently by + software OT and - software OT
. Operation when a software OT is
detected can be selected in Overtravel Function Selection (3037Hex-17Hex). When an OT limit point
does not exist, for example, on a rotating body, leave parameter 3037Hex-17Hex at its default value (=
0).
Parameter No. Function name Data Default data Unit
3037Hex-17Hex Overtravel Function Selection
0: Invalid/Infinite rotation
0 -
1: Valid (Positioning at OT po-
sition at over traveling), nor-
mal PTP
2: Valid (Immediately stopped
at over traveling), normal PTP
3037Hex-1AHex
Software Overtravel Detection
Position in the Positive Direc-
tion (MSB)
−268435455 to 268435455
(MSB: -4,096 to 4,095, LSB: 0
to 65,535)
268435455 -
3037Hex-1BHex
Software Overtravel Detection
Position in the Positive Direc-
tion (LSB)
3037Hex-1CHex
Software Overtravel Detection
Position in the Negative Direc-
tion (MSB)
−268435455 to 268435455
(MSB: -4,096 to 4,095, LSB: 0
to 65,535)
-268435455 -
3037Hex-1DHex
Software Overtravel Detection
Position in the Negative Direc-
tion (LSB)
7-7-8
Basic Return-to-origin Operation
The return-to-origin operation is started when the RUN command is input with multifunction input ter-
minal “SPD” set to OFF and terminal “ORG” set to ON. Specify the operation direction in Homing Op-
eration Selection (3037Hex-0AHex). The return-to-origin operation is as follows. Acceleration is per-
formed to the frequency set in Homing Frequency/Orientation Frequency (3037Hex-0EHex), and, after
the moving body has turned origin search limit signal "ORL" ON, movement is performed from the ini-
tial Z phase signal (reference signal for homing offset) by the amounts set in the homing offsets
7 Vector Control and Applied Functions
7-44
M1 Series EtherCAT Type User’s Manual (I670)