• The inverter may not provide sufficient performance characteristics if the motor is two or more sizes
smaller than the maximum applicable motor capacity. This is because the inverter requires a current
accuracy of at least 50% of the rated current.
•
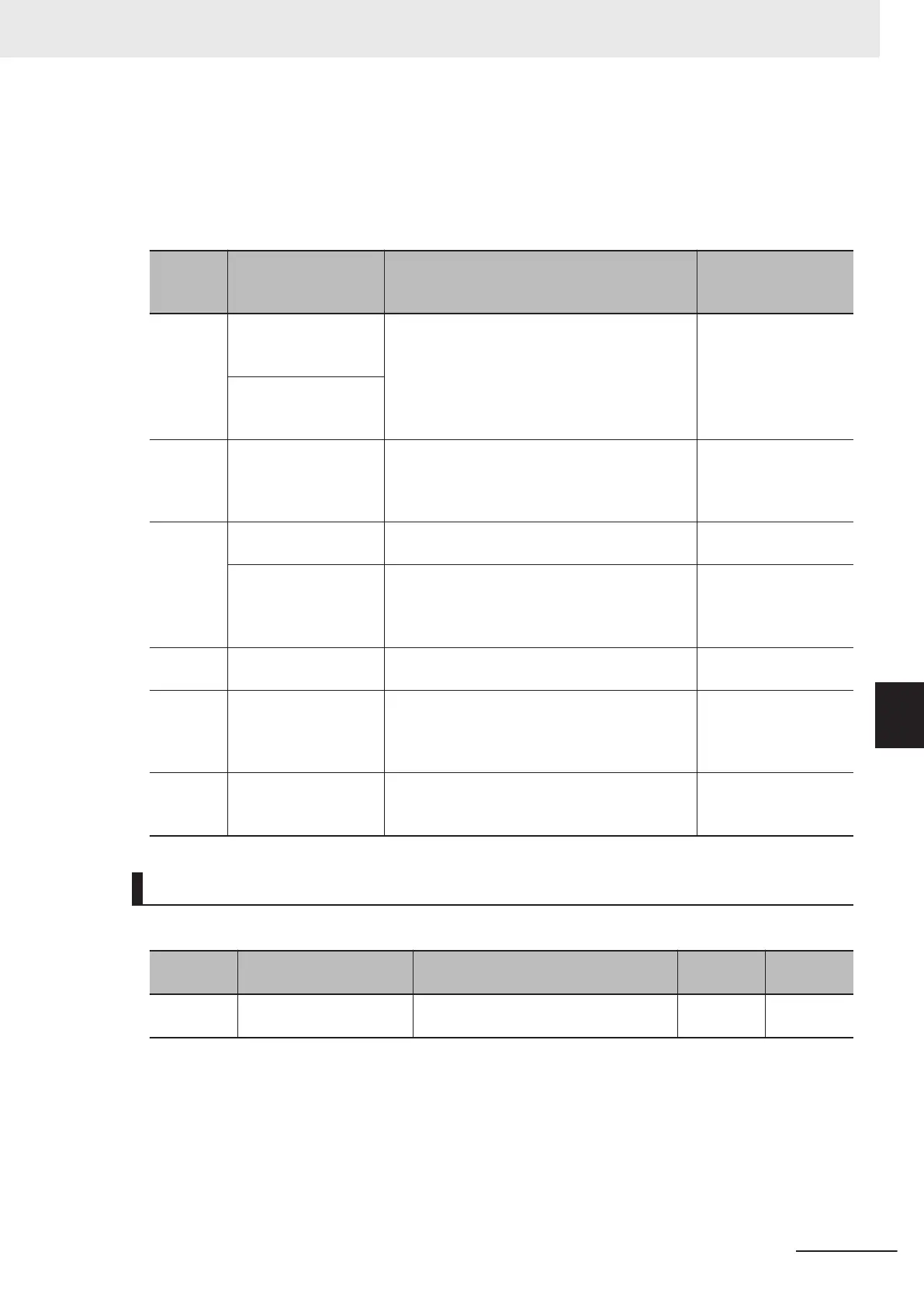
If sensorless vector control does not provide the intended performance characteristics, adjust the
motor parameters depending on the phenomenon, as shown in the following table.
Opera-
tion sta-
tus
Phenomenon Description of adjustment Adjustment item
Power
running
Actual motor speed is
lower than target
speed.
Increase the slip compensation gain (drive) or
rated slip gradually.
3007Hex-0AHex/
3009Hex-18Hex
3007Hex-0DHex/
3009Hex-1BHex
Actual motor speed is
higher than target
speed.
Regener-
ation
T
orque is insufficient at
low frequencies (a few
Hz).
Increase %R1 and no-load current gradually. 3007Hex-08Hex/
3009Hex-16Hex
3007Hex-07Hex/
3009Hex-15Hex
During
startup
Shock occurs during
startup.
Adjust the speed control P gain. 3014Hex-04Hex/
3009Hex-2EHex
Motor rotates momen-
tarily in opposite direc-
tion to instructed rota-
tional direction.
Set rotational direction limitation. 3008Hex-09Hex
At decel-
eration
Motor is hunting.
Adjust the speed control P gain. 3014Hex-04Hex/
3009Hex-2EHex
Torque
limiting
Torque becomes insuf-
ficient at low frequen-
cies when torque limit
is enabled.
Decrease the torque limit. 3004Hex-29Hex
3004Hex-2AHex
3005Hex-1
1Hex
3005Hex-12Hex
Low fre-
quency
operation
Rotation is unstable.
Adjust the speed control P gain. 3014Hex-04Hex/
3009Hex-2EHex
Output Torque Monitor Function
To monitor the output torque, reference the torque calculation value (3010Hex-08Hex).
Parameter
No.
Function name Data
Default da-
ta
Unit
3010Hex-0
8Hex
Actual torque value/
Torque command value
-999 to 999 0 %
7 Vector Control and Applied Functions
7-19
M1 Series EtherCAT Type User’s Manual (I670)
7-3 Sensorless Vector Control
7
7-3-3 Adjustments for Sensorless Vector Control