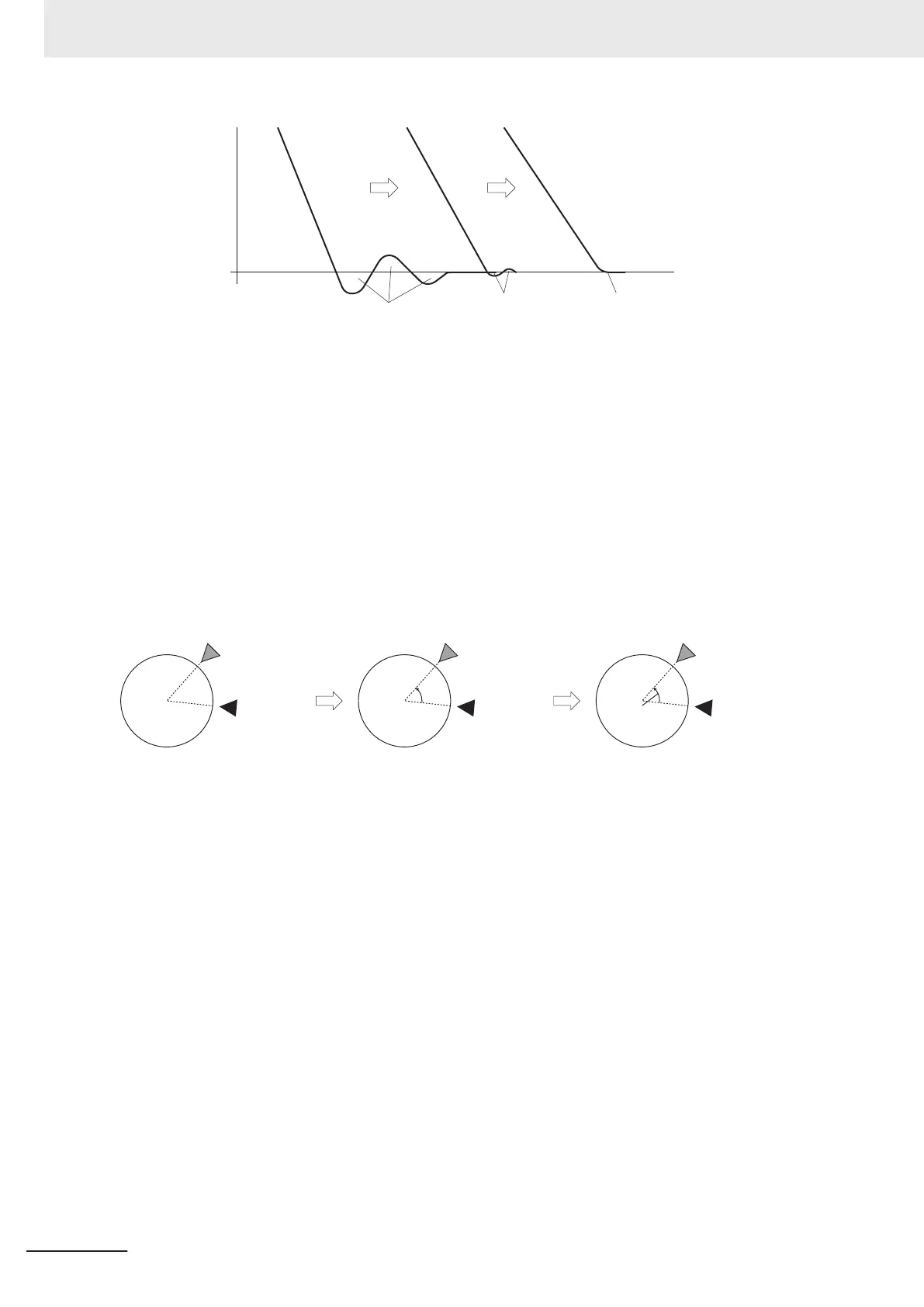
Mechanical
shaft speed
3037Hex-10Hex: Small 3037Hex-10Hex: Large
Extend
3037Hex-10Hex
Overshooting
Overshooting No overshooting
Time
Extend
3037Hex-10Hex
Preset Position (MSB) (3037Hex-29Hex), Preset Position (LSB)
(3037Hex-2AHex)
The current reference position and current feedback position can be set to any position referenced
to the machine origin. In orientation, ordinarily, the position of
fset between the machine origin and
the Z phase of the encoder is handled as the homing offset. For this reason, set Preset Position
(MSB) (3037Hex-29Hex) and Preset Position (LSB) (3037Hex-2AHex) as “0.”
Homing Offset (MSB) (3037Hex-2BHex), Homing Offset (LSB)
(3037Hex-2CHex)
The homing offset in orientation is equivalent to the position offset between the machine origin and
the Z phase of the encoder. Adjust the homing offset by the following procedure.
Mechanical origin Mechanical origin
= Current position
Encoder Phase Z
= Target position
Encoder Phase Z
Encoder Phase Z
Mechanical shaft Mechanical shaft
Movement
Mechanical shaft
(Homing Offset)
3037Hex-2BHex,
3037Hex-2CHex
Mechanical origin (0) = Preset position
3037Hex-29Hex,
3037Hex-2AHex = 0
1) When the orientation command is turned ON with the target position set as 0, perform positioning with
the Z phase position of the encoder as the origin.
2) Then, operate the motor, and move the machine shaft to the machine origin position and stop move-
ment there. Set the Current Feedback Position Monitor (MSB) (3037Hex-63Hex) and Current Feed-
back Position Monitor (LSB) (3037Hex-64Hex) at this time to Homing Offset (MSB) (3037Hex-2BHex)
and Homing Of
fset (LSB) (3037Hex-2CHex). Then, when the current position preset “PSET” is turned
ON with Preset Position (MSB) (3037Hex-29Hex) and Preset Position (LSB) (3037Hex-2AHex) set to
“0,” “0” is set to Current Feedback Position Monitor (MSB) (3037Hex-63Hex) and Current Feedback
Position Monitor (LSB) (3037Hex-64Hex).
3) For confirmation, perform orientation again. Perform orientation with the current position as “0” (origin),
and check that orientation to the machine origin position is possible.
Positioning Data 1 to 8 (3037Hex-2DHex to 3037Hex-3CHex) and Position
Data Determination Time (3037Hex-27Hex)
This parameter is for setting the positioning position referenced to the machine origin in orientation.
Up to eight points can be set, and multipoint positioning can be performed continuously by using
position command selection 1 to 3 “CP1 to CP3.” To prevent malfunction caused by chattering
when the position command selection signal is used to switch positioning data, set a time for chat-
tering to settle or longer in Position Data Determination T
ime (3037Hex-27Hex). To enable changes
to the positioning data with the RUN command ON, be sure to turn the position change command
7 Vector Control and Applied Functions
7-56
M1 Series EtherCAT Type User’s Manual (I670)
 Loading...
Loading...


