When the brake is applied during position control, the motor cannot rotate even if there exists position
error. For this reason, the integral term accumulates which sometimes causes an overload trip to oc-
cur
. When ASR integral term cancel “P-SEL” allocated to a multifunction input terminal is turned ON,
the integral term of the speed controller is canceled and P operation is performed.
Parameter
No.
Function name Data
300EHex-6
1Hex
Brake Control Operation
Selection
bit 6 = 0: Position control stopped, brake signal OFF (brake applied)
bit 6 = 1: Position control stopped, brake signal ON (brake released)
3005Hex-0
2Hex to
3005Hex-0
6Hex,
3005Hex-6
3Hex,
3005Hex-6
4Hex
Input Terminal [DI1] to
[DI7] Function Selection
119: P-SEL (ASR integral term cancellation)
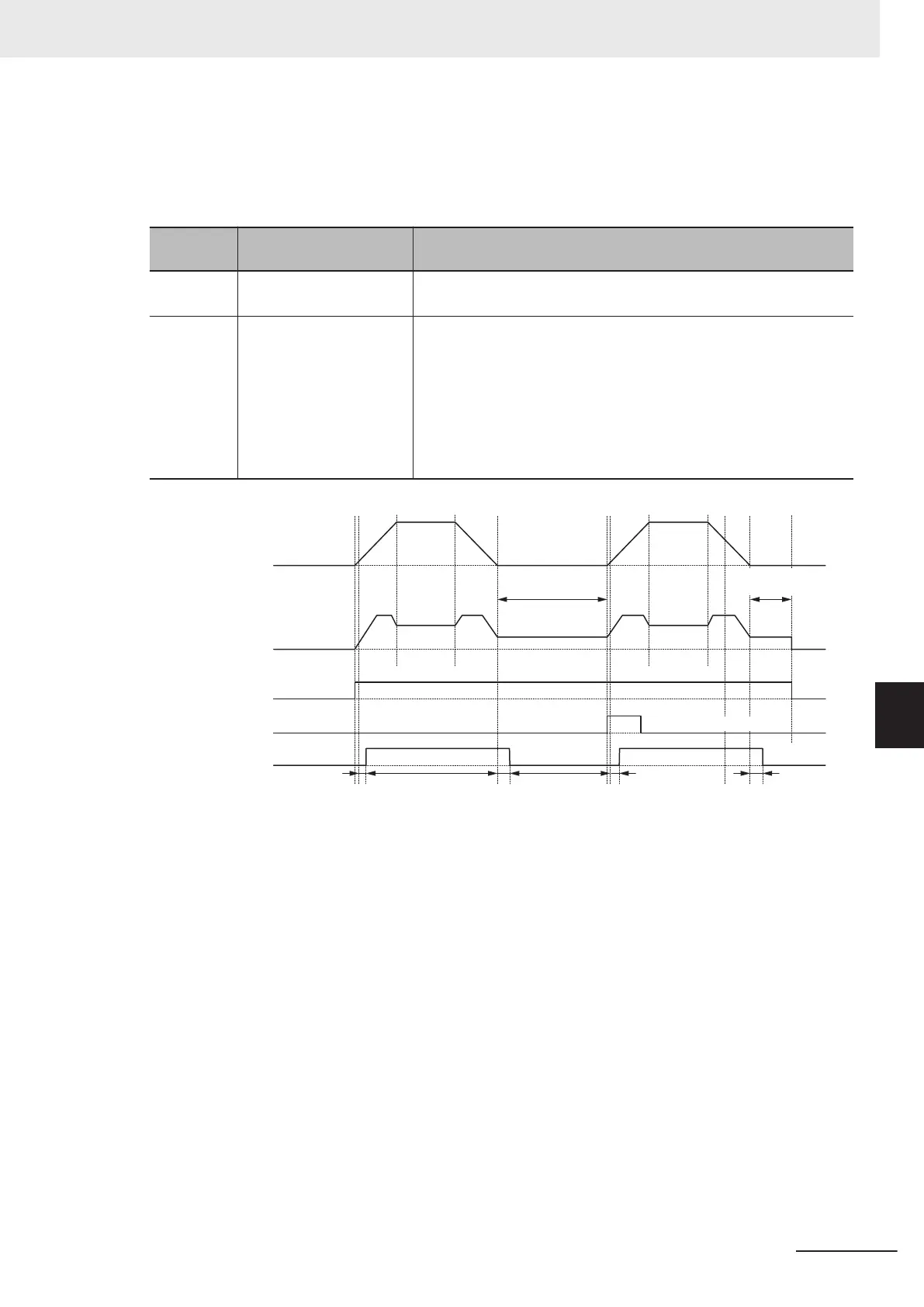
Output frequency
Output current
RUN command
“POS-SET”
Brake signal “BRK”
300EHex-46Hex
Brake Control Brake-release Frequency
300EHex-45Hex
Brake Control Brake-release Current
Direct current braking
300EHex-47Hex:
Brake Control
Brake-release Timer
300EHex-49Hex:
Brake Control
Brake-applied Timer
300EHex-47Hex:
Brake Control
Brake-release Timer
300EHex-49Hex:
Brake Control
Brake-applied Timer
300EHex-61Hex bit6
0: Brake signal ON during position control stop
1: Brake signal released during position control stop
V/f control 300EHex-61Hex bit 6 = 0 Operation time chart
Direct current
braking
OFF
OFF
OFF
OFFO
N
ON OFF
OFFON OFFON
7 Vector Control and Applied Functions
7-59
M1 Series EtherCAT Type User’s Manual (I670)
7-7 Position Control
7
7-7-15 Brake Control during Position Control
 Loading...
Loading...


