3014He
x-0FHex
data
Target terminal
Pulse input
method
Remarks
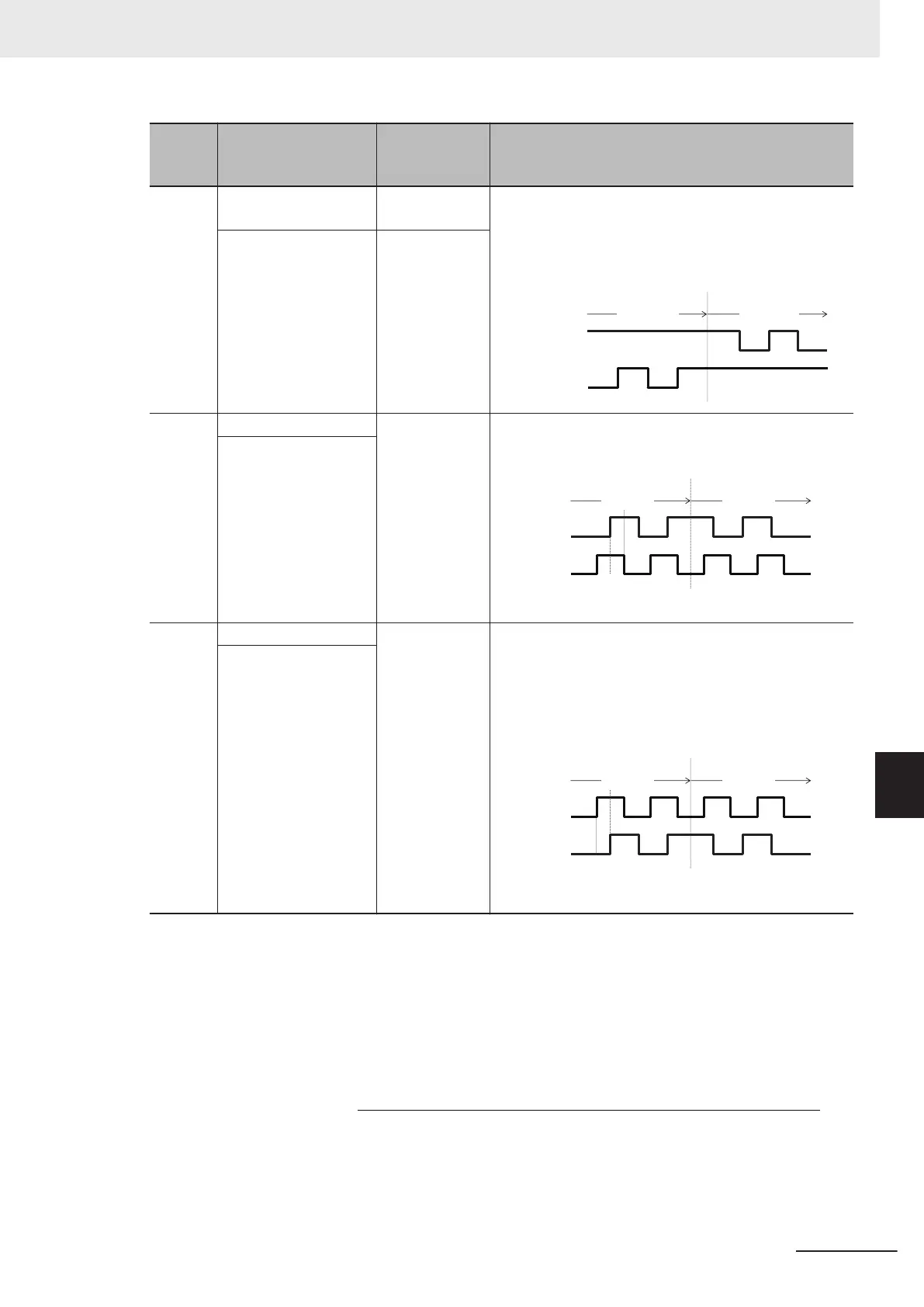
1
Input Terminal [PIA]
Forward rota-
tion pulse
A speed command corresponding to the frequency of
pulse train input is applied. If the input pulse is a forward
rotation pulse, it results in straight polarity, and if the in-
put pulse is a reverse rotation pulse, it results in reverse
polarity
.
Forward Reverse
Reverse
rotation pulse
Forward
rotation pulse
Input Terminal [PIB]
Reverse rota-
tion pulse
2
Input Terminal [PIA]
Quadrature A/B
signal (B phase
lead)
A speed command with polarity is applied based on the
phase dif
ference and frequency
, by two types of pulse
signals having a 90° phase difference (B phase lead).
Forward Reverse
Phase A input
Phase B input
Phase B lead Phase B delay
90°
Input Terminal [PIB]
3
Input Terminal [PIA]
Quadrature A/B
signal (A phase
lead)
The polarity is reversed (A phase lead becomes forward
rotation) when Input Terminal [PIA][PIB] Pulse Input For-
mat Selection (3014Hex-0FHex) = 2. If the A phase and
B phase are wired in the reverse order
, the polarity can
be corrected by setting Input Terminal [PIA][PIB] Pulse
Input Format Selection (3014Hex-0FHex) = 3.
Forward Reverse
Phase A input
Phase B input
A phase lead Phase A delay
90°
Input Terminal [PIB]
• Input Terminal [PIA][PIB] Encoder Pulse Resolution (3014Hex-10Hex)
Set the number of encoder pulses of pulse train input.
• Pulse scaling factor 1 (3014Hex-1
1Hex), Pulse scaling factor 2 (3014Hex-12Hex)
Convert the pulse train input (kps) into the set frequency by Pulse Scaling Factor 1/Pulse Scaling
Factor 2 (3014Hex-11Hex/3014Hex-12Hex).
f* [Hz] = Np [kp/S] ×
Input Terminal [PIA][PIB] Pulse Scaling Factor Numerator (3014Hex-12Hex)
Input Terminal [PIA][PIB] Pulse Scaling Factor Denominator (3014Hex-11Hex)
f* [Hz]: Frequency set value
Np [k
p/s]: Entered input pulse frequency
8 Other Functions
8-131
M1 Series EtherCAT Type User’s Manual (I670)
8-9 Other Operation Functions
8
8-9-17 Pulse Train Frequency Input
 Loading...
Loading...


