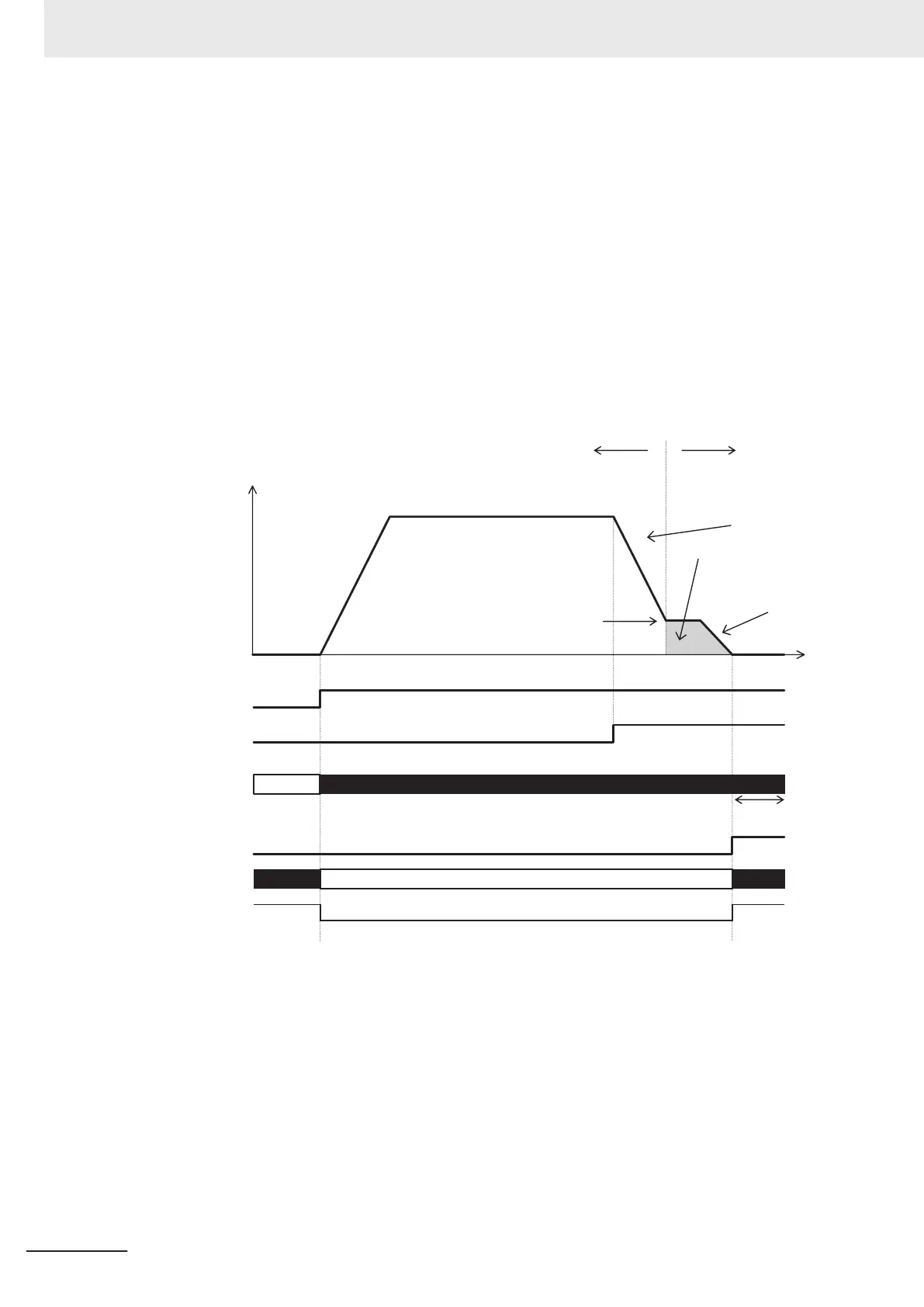
the frequency set in Homing Frequency/Orientation Frequency (3037Hex-0EHex) for the currently
selected deceleration time, control transitions to the position control mode (3), the rotation amount
that allows a deceleration stop at the setting in Deceleration Time for Homing/Orientation
(3037Hex-10Hex) up to the position of the currently selected positioning data is calculated from the
current position, and the motor rotates for that calculated rotation amount and stops.
The positioning data can be selected from Positioning Data 1 to 8 (3037Hex-2DHex to
3037Hex-3CHex) by digital input position command selection signals “CP1,” “CP2” and “CP3”.
When assigning positioning data as factory default absolute positions (ABS), the absolute positions
are referenced to the Z phase of the encoder
. To assign positioning data as absolute positions ref-
erenced not to the Z phase of the encoder but to the machine origin position, Positioning Data 1 to
8 (3037Hex-2DHex to 3037Hex-3CHex) can be handled as it is as the positioning data of the ma-
chine origin reference by setting the position offset of the “encoder Z phase - machine origin posi-
tion” to Homing Offset (MSB) (3037Hex-2BHex) and Homing Offset (LSB) (3037Hex-2CHex).
OFF
OFF
OFF
OFF
OFF
OFF
O
N
ON
ON ON
ON
O
N
ON ON
Position control
Stop required pulse
Time
Speed control
Set frequency
[FW]
[ORT]
[POK]
[P-SEL]
Inverter
output status
Brake status
Servo lock status
(2)
(1)
Frequency
Creep Frequency
[3037Hex-0FHex]
Deceleration Time
[3004Hex-09Hex, 3005Hex-0CHex,
3005Hex-0EHex, 3005Hex-10Hex]
Deceleration Time
for Homing/Orientation
[3037Hex-10Hex]
Acceleration Time
[3004Hex-08Hex,
3005Hex-0BHex,
3005Hex-0DHex,
3005Hex-0FHex]
(3)
Orientation from a stopped state
When the control mode is vector control with speed sensor, servo lock operation is performed when
positioning by orientation is completed, and digital output “POK” is output if positional deviation is
within Positioning Completed Range (3037Hex-28Hex). When the positioning position is changed
from this state and orientation is performed again with “POS-SET” set to ON, control changes to
position control and positioning is performed within one rotation. At this time, either of “Nearest di-
rection” operation which performs positioning by the shortest distance or “Command direction” op-
eration which follows the direction instructed in the RUN command can be selected at Orientation
Selection (3037Hex-09Hex) regardless of the operation direction. In V/f control with speed sensor,
the control mode changes to DC braking and the inverter maintains output. In orientation from a
7 Vector Control and Applied Functions
7-50
M1 Series EtherCAT Type User’s Manual (I670)
 Loading...
Loading...



