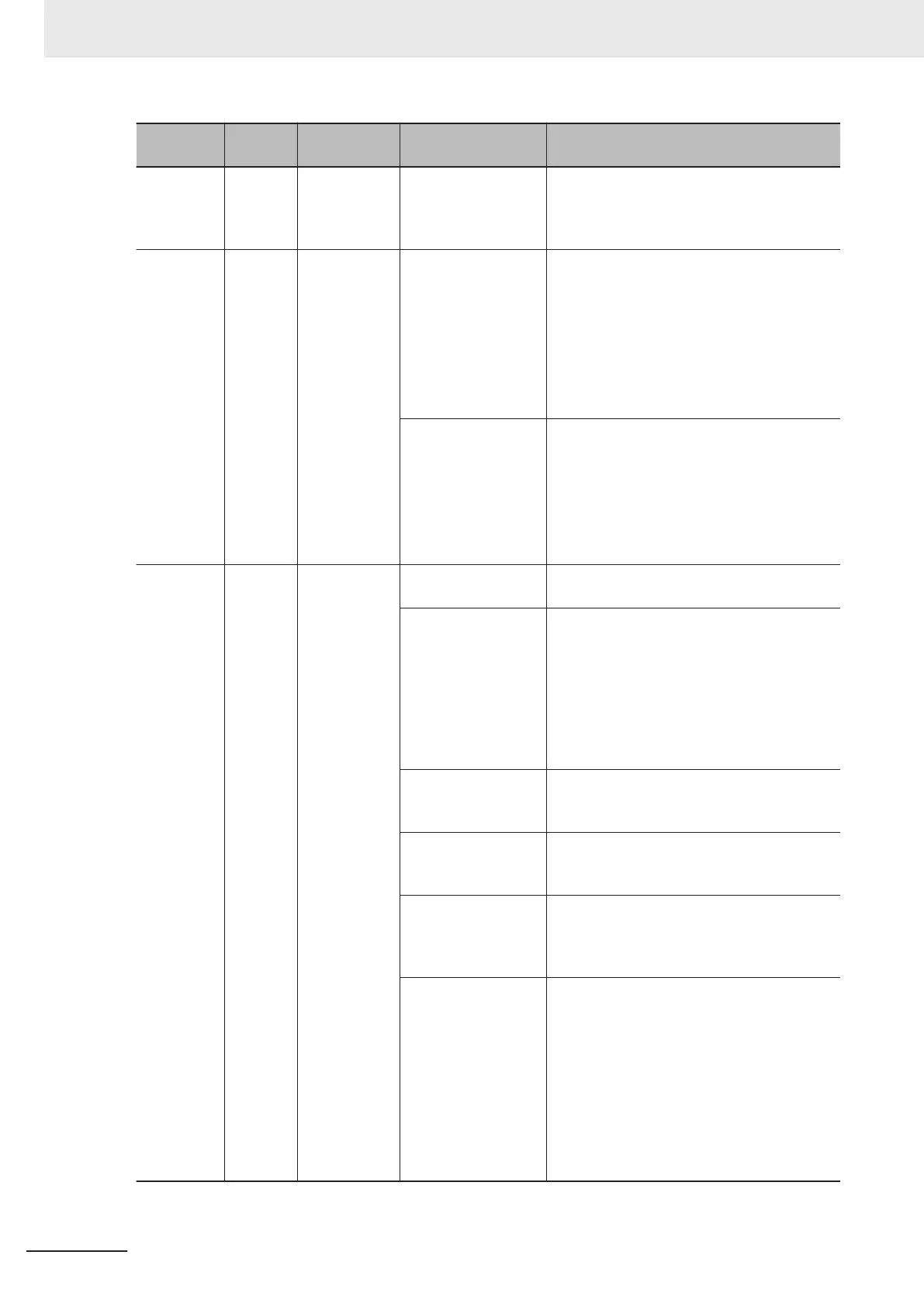
Alarm
code
Alarm
subcode
Name Description Check point and remedy reference
10 Hex
(PbF)
0000 Hex
Charging cir-
cuit malfunc-
tion (1.5 kW
min.)
(1) The charging cir-
cuit is damaged
Repair of the inverter is required.
→ Replace the inverter.
1C Hex
(PG)
0000 Hex
PG discon-
nection
(1) Break in wiring
between pulse gen-
erator and option
Check that the pulse generator is correctly
connected, and that there is no break in wir-
ing.
→ Check that the pulse generator is cor-
rectly connected, or tighten screws.
→ Check that the connecting sections are
not caught.
→ Replace with wiring that is not broken.
(2) Strong noise re-
ceived from sur-
rounds
Check measures against noise (grounding
conditions, signal wiring and communication
cable/main circuit wiring and installation
methods, etc.).
→ Implement measures against noise.
→ Separate main circuit wiring and control
circuit wiring as much as possible.
34 Hex (d0) 0000 Hex
Excessive po-
sitioning devi-
ation
(1) Encoder discon-
nection
Check that there are no breaks in encoder
wiring.
(2) Mismatch be-
tween the encoder
rotation direction
(wiring phase se-
quence) and motor
rotation direction (in-
verter output phase
sequence)
Connect so that all directions match, and re-
view settings.
Review 3014Hex-0FHex to 3014Hex-12Hex
settings values.
(3) Deviation over
settings values are
too low
Review 3037Hex-18Hex, 3037Hex-19Hex
settings values.
If settings values are low
, increase these.
(4) Position control
gain is too low
Review 3037Hex-04Hex, 3037Hex-05Hex
settings values.
If settings values are low, increase these.
(5) Speed control
gain is too low.
Review 3014Hex-04Hex (3009Hex-2EHex,
3013Hex-2EHex, 300CHex-2EHex) settings
values.
If settings values are low, increase these.
(6) T
orque is limited If a torque limit is operating, then position
control and speed control will not operate
correctly.
T
ake the following measures so that the tor-
que limit is not applied.
• Reduce load
• Review acceleration/deceleration time
• To reduce load, review the speed reduc-
tion ratio, motor capacity, and other equip-
ment configuration.
9 Troubleshooting
9-24
M1 Series EtherCAT Type User’s Manual (I670)
 Loading...
Loading...



