A-97
Appendicies
G5 Series AC Servo Drives With Built-in EtherCAT Communications, Linear Motor Type
A-3 Sysmac Error Status Codes
App
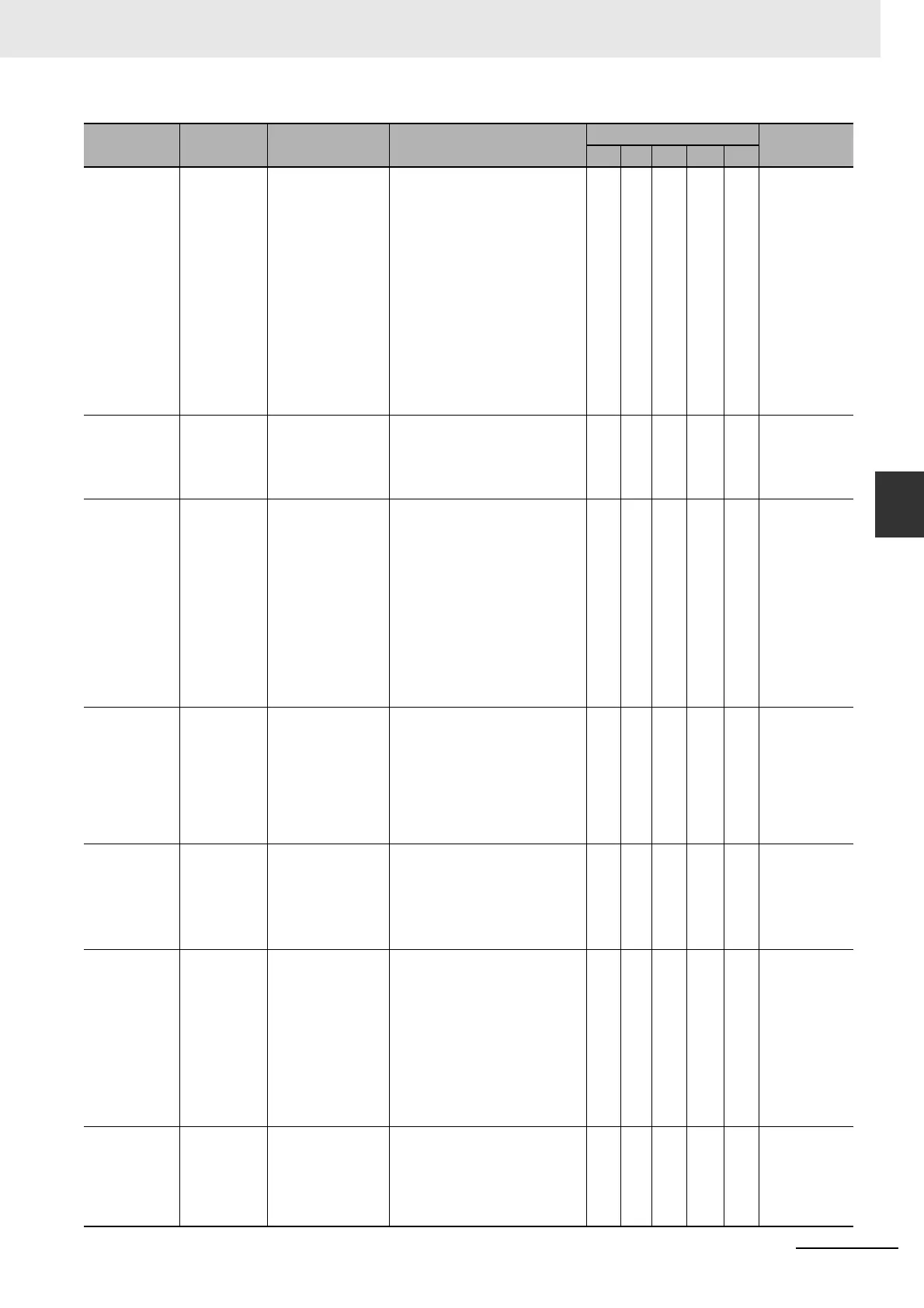
A-3-1 Error Table
28030000 hex Motor
Combination
Error 2
The value set for
the motor exceeds
the drive range of
the motor.
• The Motor Rated Rms Current
is too low compared with the
maximum motor capacity of the
Servo Drive.
• The percentage of the Motor
Coil Unit Mass to the Motor
Rated Force is too high.
• The automatically adjusted
Current Loop Proportional
Gain/Current Loop Integral
Gain is too high.
• The percentage of the Motor
Peak Absolute Current to the
rated current of the motor is
greater than 500%.
page A-124
34E10000 hex Servo Drive
Overheat
The temperature of
the Servo Drive
radiator or power
elements exceeded
the specified value.
• The ambient temperature of the
Servo Drive exceeded the
specified value.
• Overload
page A-125
34E20000 hex Overload When the feedback
value for force
command exceeds
the overload level
specified in the
Overload Detection
Level Setting (3512
hex), overload
protection is
performed
according to the
overload
characteristics.
• Operation was continued for a
long time while overloaded.
• There is incorrect wiring of the
motor line or a broken cable.
page A-126
34E30000 hex Regeneration
Overload
The regenerative
energy exceeds the
processing capacity
of the Regeneration
Resistor.
• The load mass is too large.
• The motor speed is too high.
• This Regeneration Resistor
cannot be used for continuous
regenerative braking. (The
operating limit of the external
resistor is limited to a 10%
duty.)
page A-127
34E40000 hex Error Counter
Overflow
Position error
pulses exceeded
the setting of the
Following error
window (6065 hex).
• Motor operation does not follow
the command.
• The value of the Following error
window (6065 hex) is small.
• The external encoder wiring is
incorrect.
page A-128
34E50000 hex Excessive
Velocity Error
The difference
between the
internal position
command velocity
and the actual
velocity (i.e., the
velocity error)
exceeded the
Excessive Velocity
Error Setting (3602
hex).
•
Motor operation does not follow
the command.
• Th
e setting of the Excessive
Velocity Error Setting (3602
hex) is too small.
page A-129
34E60000 hex Overspeed The motor speed
exceeded the value
set on the
Overspeed
Detection Level
Setting (3513 hex).
• The velocity command value is
too large.
• There is overshooting.
• The wiring is incorrect.
page A-129
Event code Event name Meaning Assumed cause
Level
Reference
Maj Prt Min Obs Info

 Loading...
Loading...

