12-27
12 Pulse Outputs
CP2E CPU Unit Software User’s Manual(W614)
12-5 Positioning Linear Interpolation
12
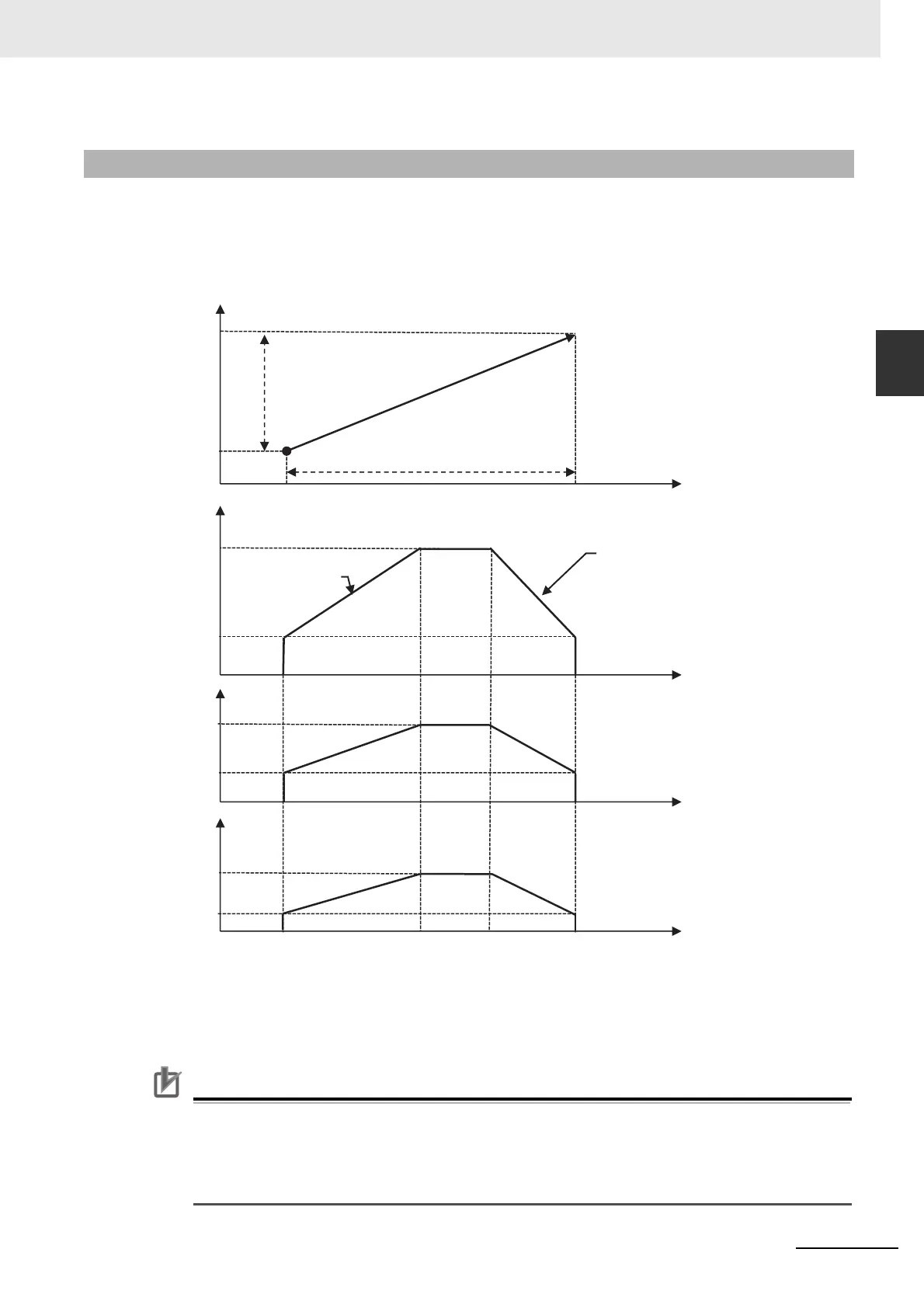
12-5-2 Positioning Linear Interpolation Configuration
The target frequency, starting frequency, acceleration and deceleration rate, the number of output
pulses are set beforehand, and linear interpolation positioning control is performed by executing the
instruction.
The following example shows the two-axis linear interpolation.
• The target frequency and starting frequency set the frequency of linear interpolation positioning. The
frequency and travel distance of each axis are automatically set internally.
• The stop during linear interpolation can be immediate stop or deceleration stop.
In the case of a deceleration stop, it stops on a linear interpolation line. Please execute the linear
interpolation instruction again to restart.
Precautions for Correct UsePrecautions for Correct Use
The linear interpolation positioning can not be performed with the origin undefined. Please spec-
ify them when the origin is defined by performing the origin searches.
If the output speed is less than 125 Hz, pulse output cannot be performed because the number
of pulse per cycle is less than one pulse. As a result, the pulse duty factor may not be 50%.
12-5-2 Positioning Linear Interpolation Configuration
Startup position
Port 1 position
Target position
(S+6, S+8)
Port 0 position
Time
Time
Time
Port 0 frequency
Port 1 frequency
Target frequency
(S+2)
Deceleration rate(S+1)
Acceleration rate(S)
Port 0 amount of movement
Port 1 amount of movement
Startup frequency
(S+4)
Frequency on the line