12-67
12 Pulse Outputs
CP2E CPU Unit Software User’s Manual(W614)
12-11 Pulse Output Pattern
12
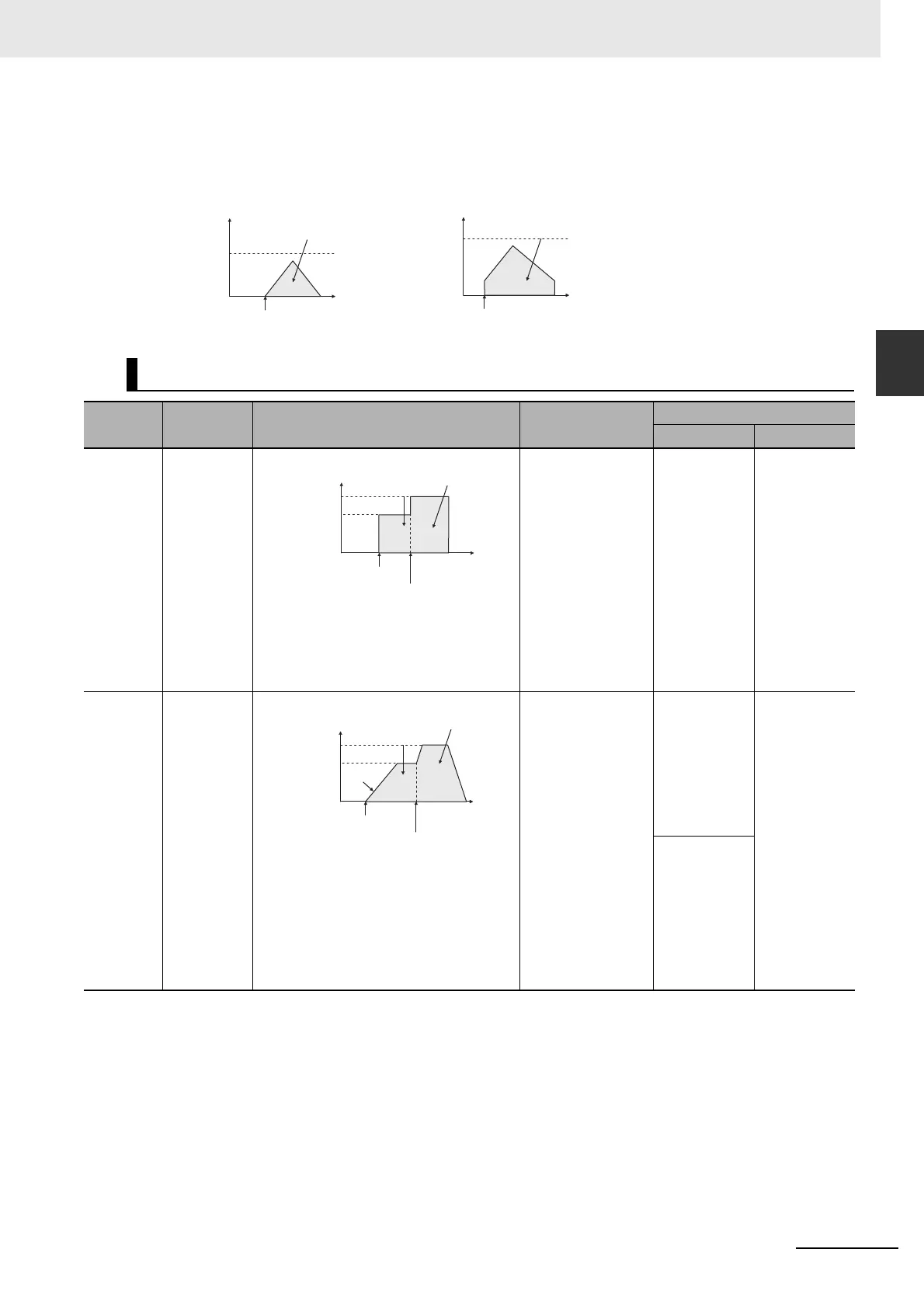
12-11-2 Positioning Control (Independent Mode)
* Triangular Control
If the specified number of pulses is less than the number required just to reach the target frequency and
return to zero, the function will automatically reduce the acceleration/deceleration time and perform triangu-
lar control (acceleration and deceleration only.) An error will not occur.
Changing Settings
Operation
Example
application
Frequency changes Description
Procedure
Instruction Settings
Change
speed in
one step
Changing
the speed in
one step
during oper-
ation
SPED can be exe-
cuted during posi-
tioning to change
(raise or lower) the
pulse output fre-
quency in one step.
The target position
(specified number
of pulses) is not
changed.
PULS
↓
SPED
(Independent)
↓
SPED
(Independent)
• Number of
pulses
• Relative or
absolute
pulse speci-
fication
• Port
• Pulse +
Direction
• Indepen-
dent
• Target fre-
quency
Change
speed
smoothly
(with
accelera-
tion rate =
decelera-
tion rate)
Changing
the target
speed (fre-
quency)
during posi-
tioning
(accelera-
tion rate =
decelera-
tion rate)
ACC can be exe-
cuted during posi-
tioning to change
the acceleration/
deceleration rate
and target fre-
quency.
The target position
(specified number
of pulses) is not
changed.
PULS
↓
ACC
(Independent)
↓
ACC
(Independent)
• Number of
pulses
• Relative or
absolute
pulse speci-
fication
• Port
• Pulse +
Direction
• Indepen-
dent
• Accelera-
tion/decel-
eration rate
• Target fre-
quency
PLS2
↓
ACC
(Independent)
Pulse frequency
Target
frequency
Execution of ACC
Time
Specified number of pulses
(Specified with PULS)
Pulse frequency
Target
frequency
Execution of PLS2
Specified number of pulses
(Specified with PLS2)
Time
Pulse frequency
New target frequency
Target frequency
Execution of SPED
(independent mode)
SPED (independent mode)
executed again to change the
target frequency. (The target
position is not changed.)
Time
Specified number of
pulses (Specified with
PULS.)
Number of pulses
specified with PULS
does not change.
Pulse frequency
New target frequency
Target frequency
Time
Specified number of
pulses (Specified
with PULS.)
Number of pulses
specified with PULS
does not change.
Execution of ACC
(independent mode)
ACC (independent mode) executed
again to change the target frequency.
(The target position is not changed,
but the acceleration/deceleration rate
is changed.)
Acceleration/
deceleration rate