Operation
45
VG10 / VGC10
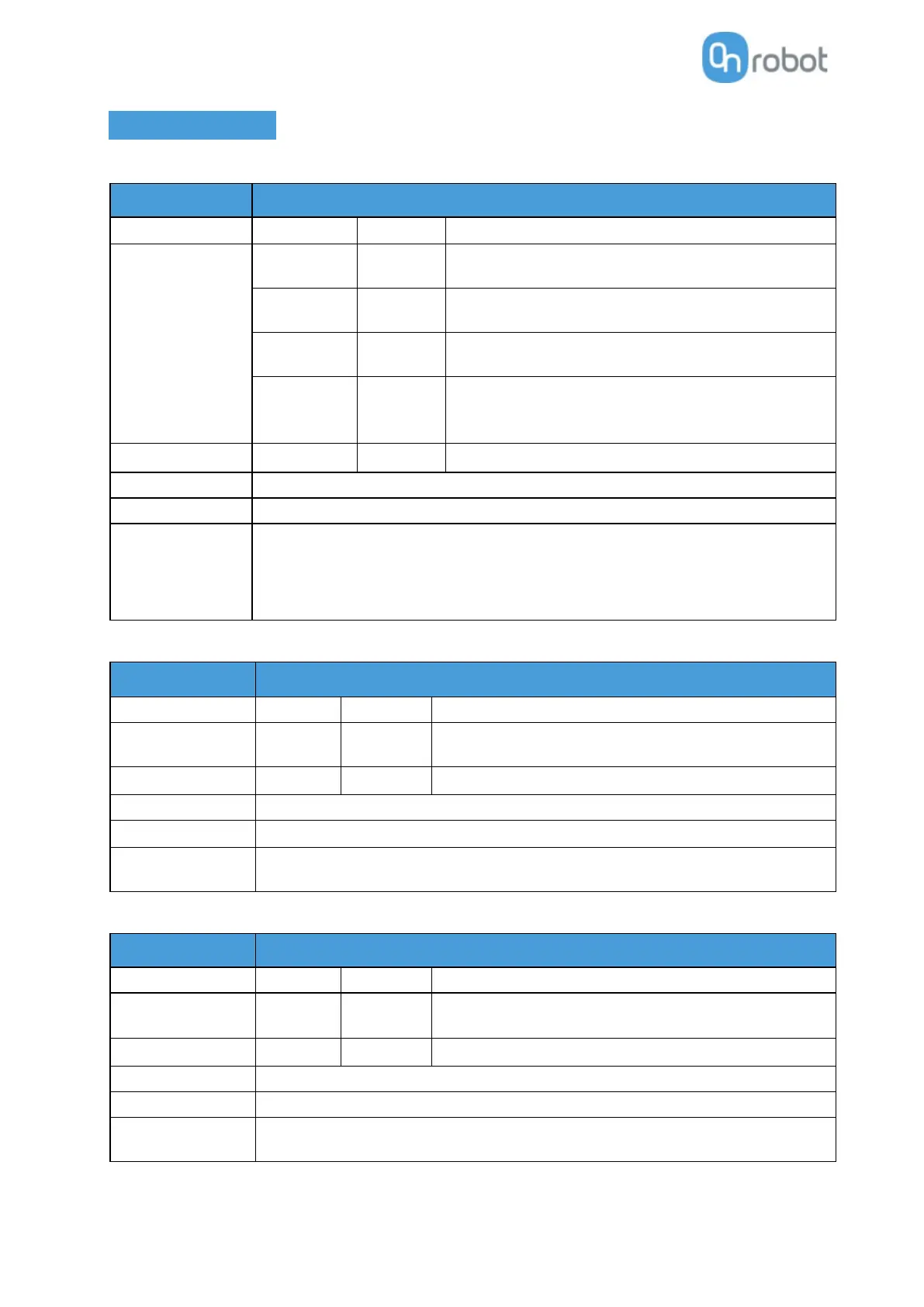
OR_VG10_grip(instance, chA_vacuum, chB_vacuum, wait)
1: single or primary - in dual configuration
2: secondary in dual configuration
Required vacuum level for channel A in %, set 0 to
release
Required vacuum level for channel B in %, set 0 to
release
Wait until the vacuum reach the required level
0: don’t wait for vacuum
1: wait until the vacuum reach the required level
Set the required vacuum for channels or release the part gripped.
instance = 1
vacuumA = 20
vacuumB = 20
waitFor = 1
CallProc OR_VG10_grip(instance, vacuumA, vacuumB, waitFor)
OR_VG10_getVacA(instance)
1: single or primary - in dual configuration
2: secondary in dual configuration
Vacuum level of A channel in %
Get actual vacuum level of A channel.
instance = 1
CallProc vacuum_A = OR_VG10_getVacA(instance)
OR_VG10_getVacB(instance)
1: single or primary - in dual configuration
2: secondary in dual configuration
Vacuum level of B channel in %
Get actual vacuum level of B channel.
instance = 1
CallProc vacuum_B = OR_VG10_getVacB(instance)