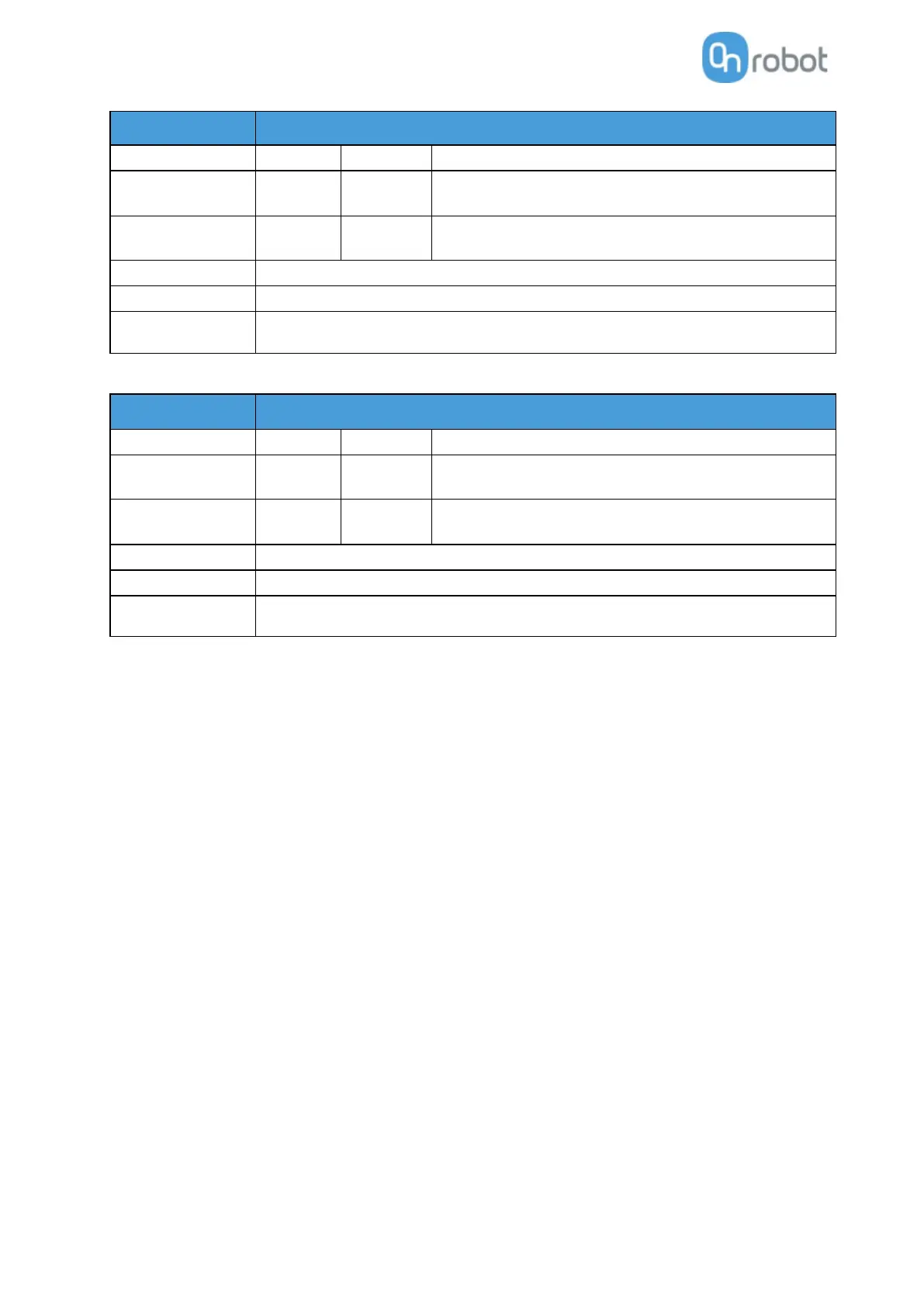
1: single or primary - in dual configuration
2: secondary in dual configuration
0: idle
1: busy (fingers are moving)
Checks gripper state (busy or idle).
instance = 1
CallProc RG_busy = OR_RGx_isBusy(instance)
1: single or primary - in dual configuration
2: secondary in dual configuration
0: safety switch not triggered, normal operation
1: safety switch triggered, gripper disabled
Checks safety switch status.
instance = 1
CallProc safetyswitchOn = OR_RGx_isSSOn(instance)