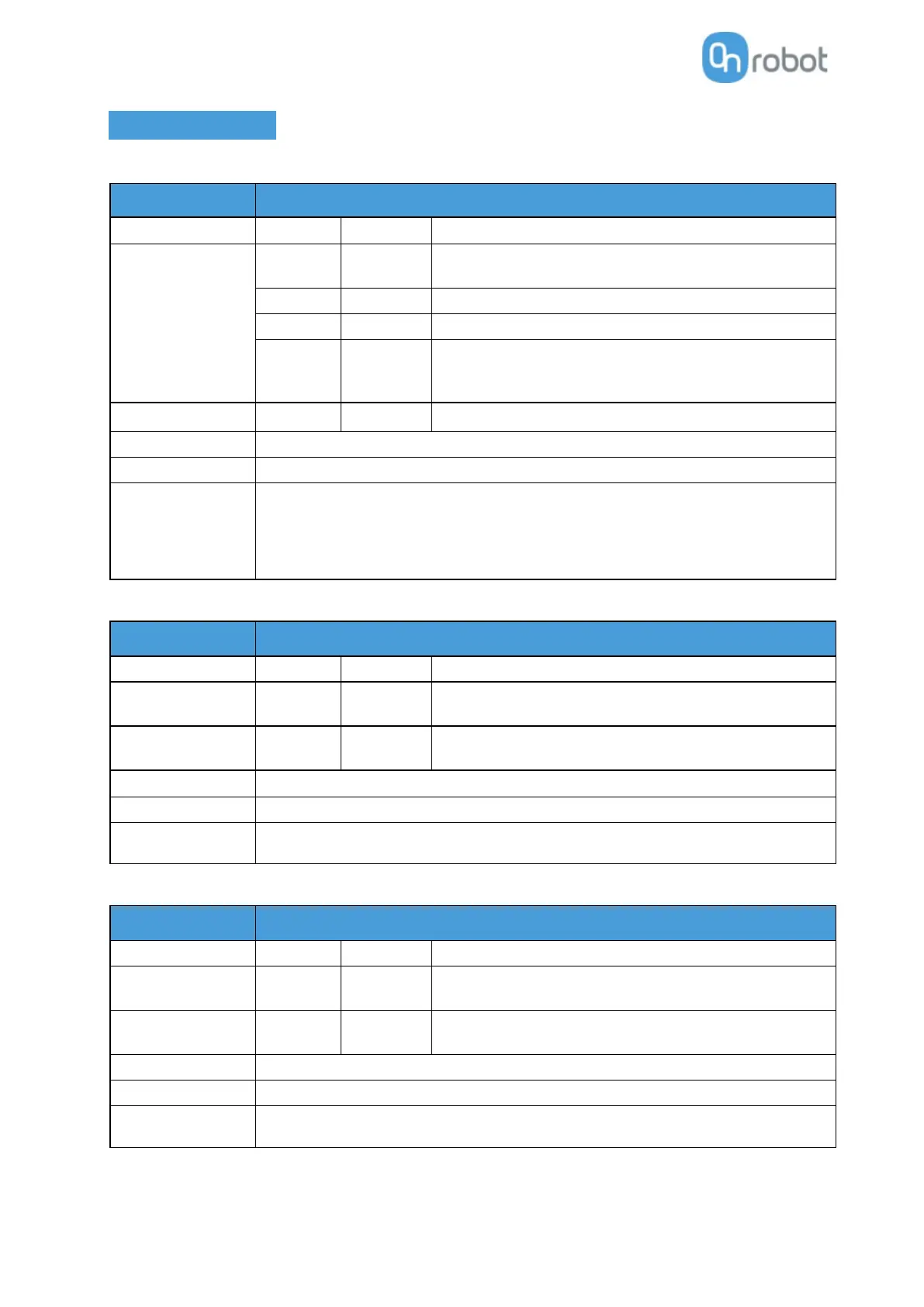
OR_RGx_move(instance, width, force, wait)
1: single or primary - in dual configuration
2: secondary in dual configuration
Define the distance in mm
Define the grip force in N
0: return after command is executed (without waiting
for gripper fingers move)
1: return after fingers reached the position
instance = 1
width = 50
force = 20
waitFor = 1
CallProc OR_RG2FT_move (instance, width, force, waitFor)
1: single or primary - in dual configuration
2: secondary in dual configuration
0: gripper is not connected
1: gripper is connected
Checks that is RGx connected or not.
instance = 1
CallProc RG_connected = OR_RGx_isConn(instance)
1: single or primary - in dual configuration
2: secondary in dual configuration
0: grip not detected
1: grip detected (something gripped)
Checks grip (part gripped or not).
instance = 1
CallProc RG_grip = OR_RGx_isGrip(instance)