Robot Pose: Coordinate and rotation values for the waypoint.
Set via Tool button: This checkbox allows the command to automatically get the Robot Pose
values when pressing the tool button. In this case, the LED of the Tool button turns to steady
green.
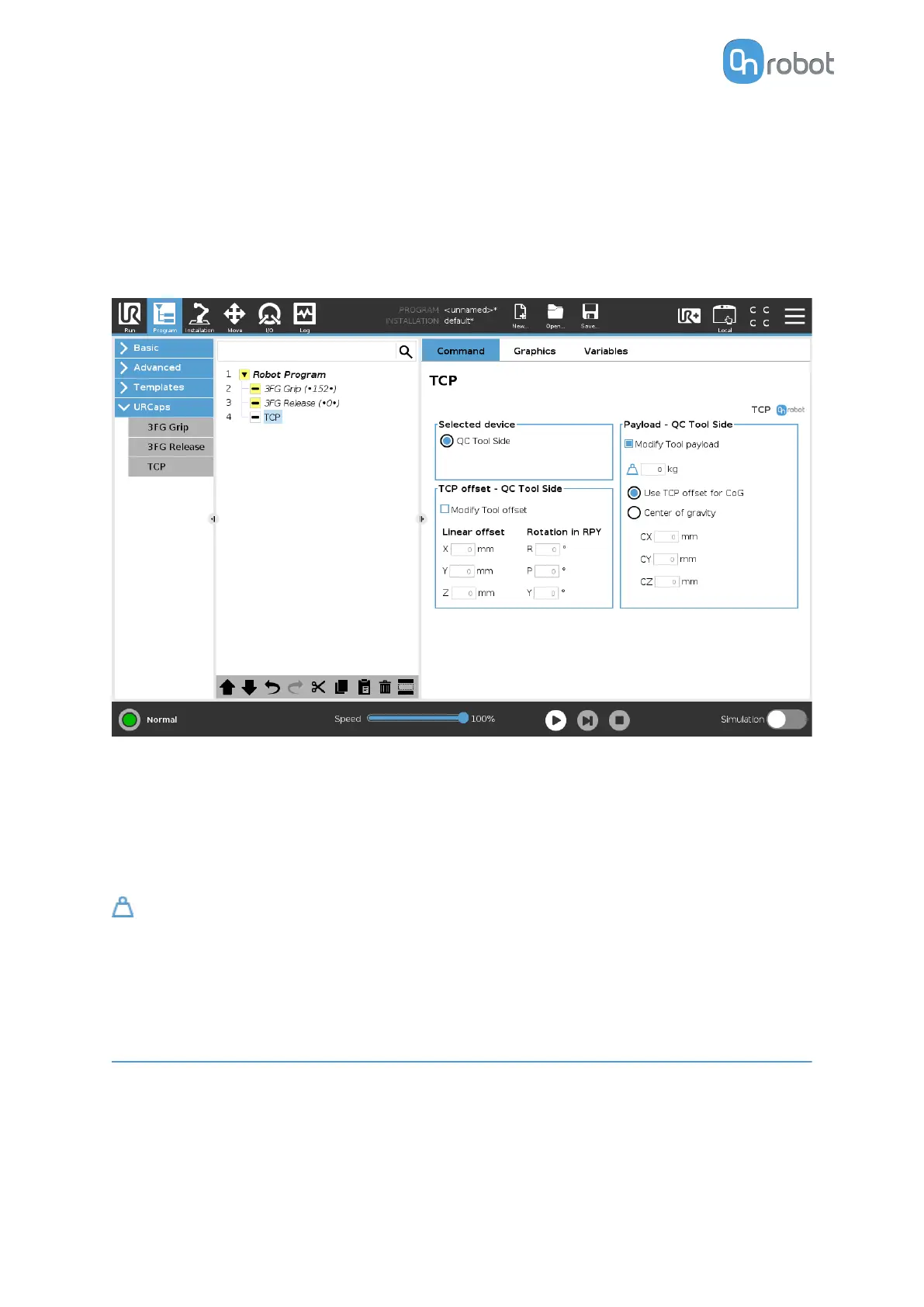
6.1.1.7. TCP
The TCP command is used to set the current TCP and/or payload for the robot.
TCP oset
Set the Linear oset (X,Y,Z) and the Rotation in RPY (Roll-Pitch-Yaw) values to adjust the
OnRobot device dependent calculated TCP.
Payload
Modify Tool payload: If enabled the UR's payload will be overwritten.
enter the workpiece mass that is attached to the device. The device own mass is added
automatically.
Use TCP oset for CoG: set the center of gravity of the workpiece at the active TCP position.
Center of gravity CX, CY, CZ: set the location of the center of gravity of the workpiece.
6.2. URCap Toolbar
The Toolbar makes it simple to operate the tools while you are programming or during
runtime.
OPERATION
39
 Loading...
Loading...







