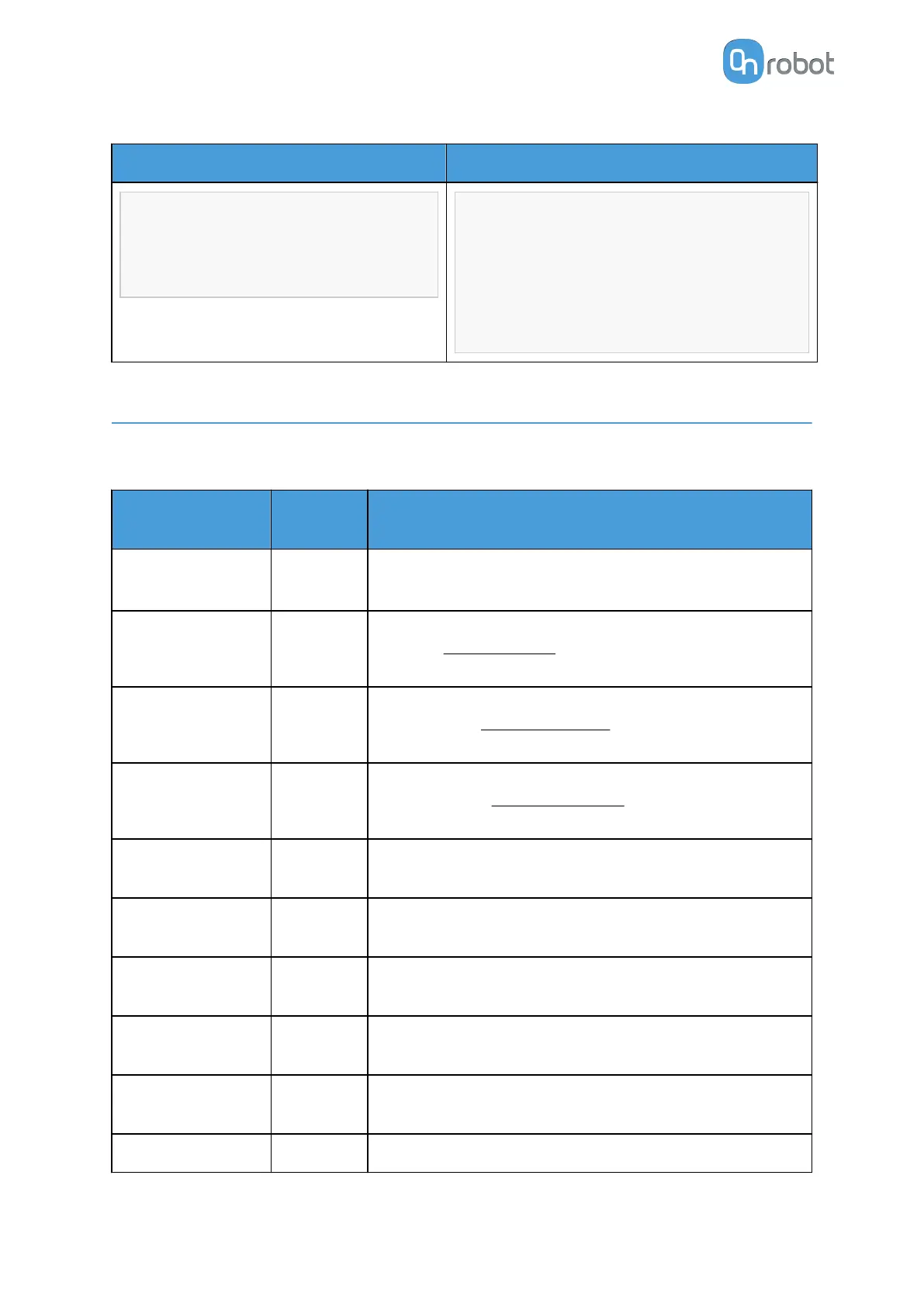
Single Dual
Robot program
TCP (Optional)
MoveJ (Set TCP = Active TCP)
Robot program
TCP (Select Gripper 1)
MoveJ (Set TCP = Active TCP)
TCP (Select Gripper 2)
MoveJ (Set TCP = OnRobot_Dual_2)
6.5. Feedback Variables
6.5.1. RG2-FT
Feedback
Variable
Unit Description
on_return The return value for the OnRobot commands
F3D [N] Length of the 3D force vector
F3D = √ Fx² + Fy² + Fz²
F3D_Left [N] Length of the 3D force vector for the left finger sensor
F3D_Left = √ Fx
L
² + Fy
L
² + Fz
L
²
F3D_Right [N] Length of the 3D force vector for the right finger sensor
F3D_Right = √ Fx
R
² + Fy
R
² + Fz
R
²
FT_Base [3xN,
3xNm]
Force and torque values calculated in the Base
Coordinate system, in an array
FT_Left [3xN,
3xNm]
list of {Fx,Fy,Fz,Tx,Ty,Tz} for the left finger sensor
FT_Right [3xN,
3xNm]
list of {Fx,Fy,Fz,Tx,Ty,Tz} for the right finger sensor
FT_Tool [3xN,
3xNm]
Force and torque values calculated in the Tool
Coordinate system, in an array
Part_Width [mm] The actual value of the detected part width (-1 if it not
applicable) measured by the proximity sensors
Proximity_Left [mm] The left proximity (distance) sensor actual value
OPERATION
50