Parker Hannifin S.p.A. - Divisione S.B.C. “SPD” User’s Manual
48
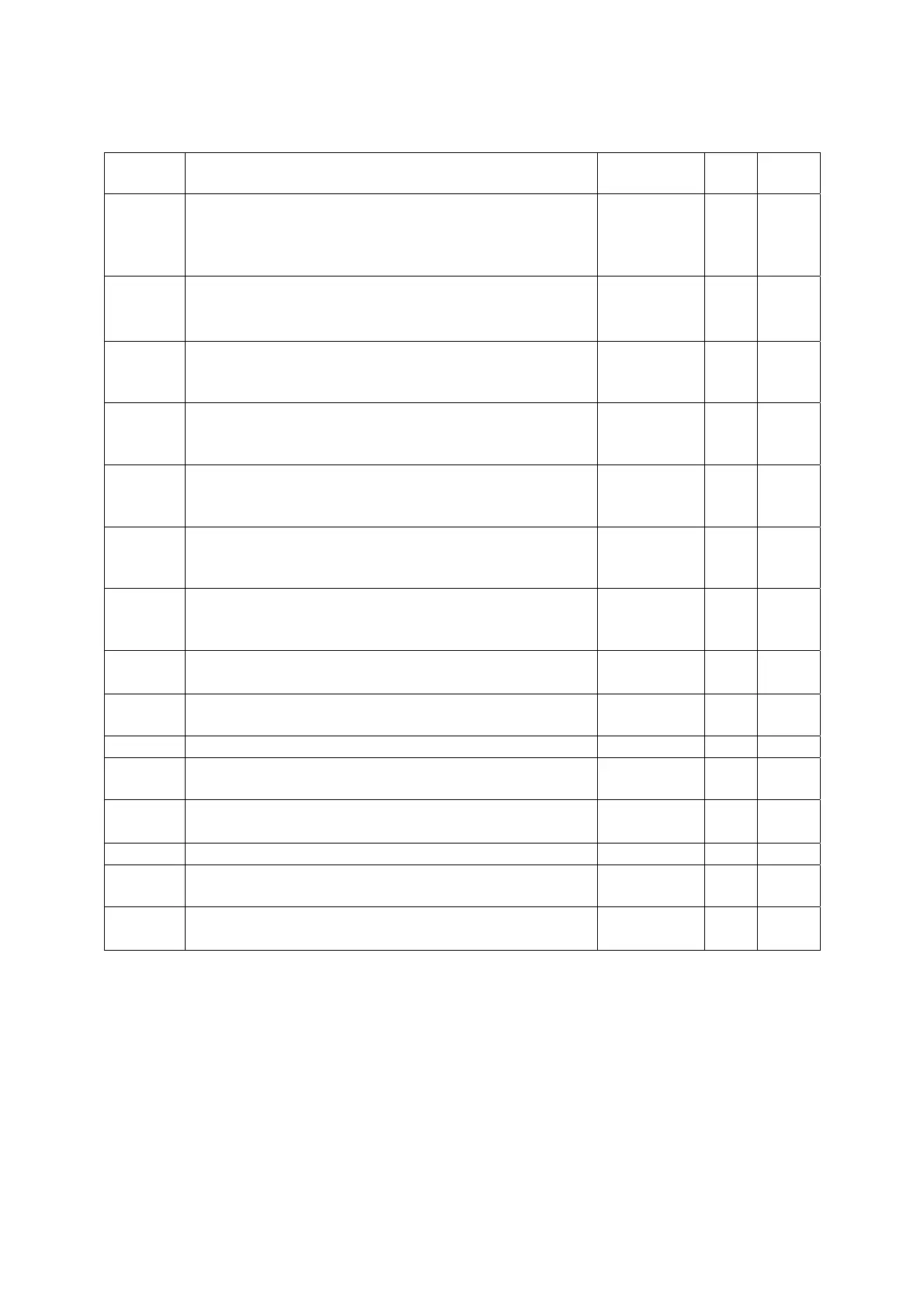
Par. Description Field/Unit Def. Type/
Notes
Pr50
Maximum speed. This parameter limits the
maximum speed of the motor. It can be useful to
limit the speed during a sudden link or during a quick
change of speed.
0÷9000
[rpm]
3000 R/W
M
Pr51 Position error
-32768 ÷
+32767
[count]
0
R/W
M
Pr52
Reference multiplier. Using this parameter and
Pr53, the user can set the ratio desired for the input
reference frequency.
1 R/W
M
Pr53
Reference divider. Using this parameter and Pr52,
the user can set the ratio desired for the input
reference frequency.
[rpm] 1 R/W
M
Pr54
Encoder-in rotation speed (read-only). Indicates
the input reference frequency translated into rpm
(based on 4096 imp/revolution).
[rpm] 0
R
Pr55
Window for servo-error 55. If the position error as
an absolute value exceeds the value set in Pr55
b70.4=1 otherwise is set to70.4 = 0.
[count] 1000 R/W
M
Pr56
Window for servo-error 56. If the position error as
an absolute value exceeds the value set in Pr56
b70.5=1 otherwise is set to70.5 = 0.
[count] 100 R/W
M
Pr57 Proportional gain for the position regulator
0 ÷ 32000 100 R/W
M
Pr58:59
Value captured. Value of Pr66:67 acquired on the
positive front of the relevant input (refer to Pb70.0).
[count] 0
Pr60:61 Regulator position reference.
[count] 0 R
Pr62:63
Motor position (resolver). If incremented by 4096
steps per revolution.
[count] 0 R
Pr64:65
Position offset.
[count] 0 R/W
M
Pr66:67
Encoder-in counter.
[count] 0 R
Pr68:69
Value captured. Value of the position of the motor
captured on the positive end of the input (X (0).
[count] 0 R
Pr106 Feed forward scale
0 ÷ 1000 0 R/W
M