Parker Hannifin S.p.A. - Divisione S.B.C. “SPD” User’s Manual
49
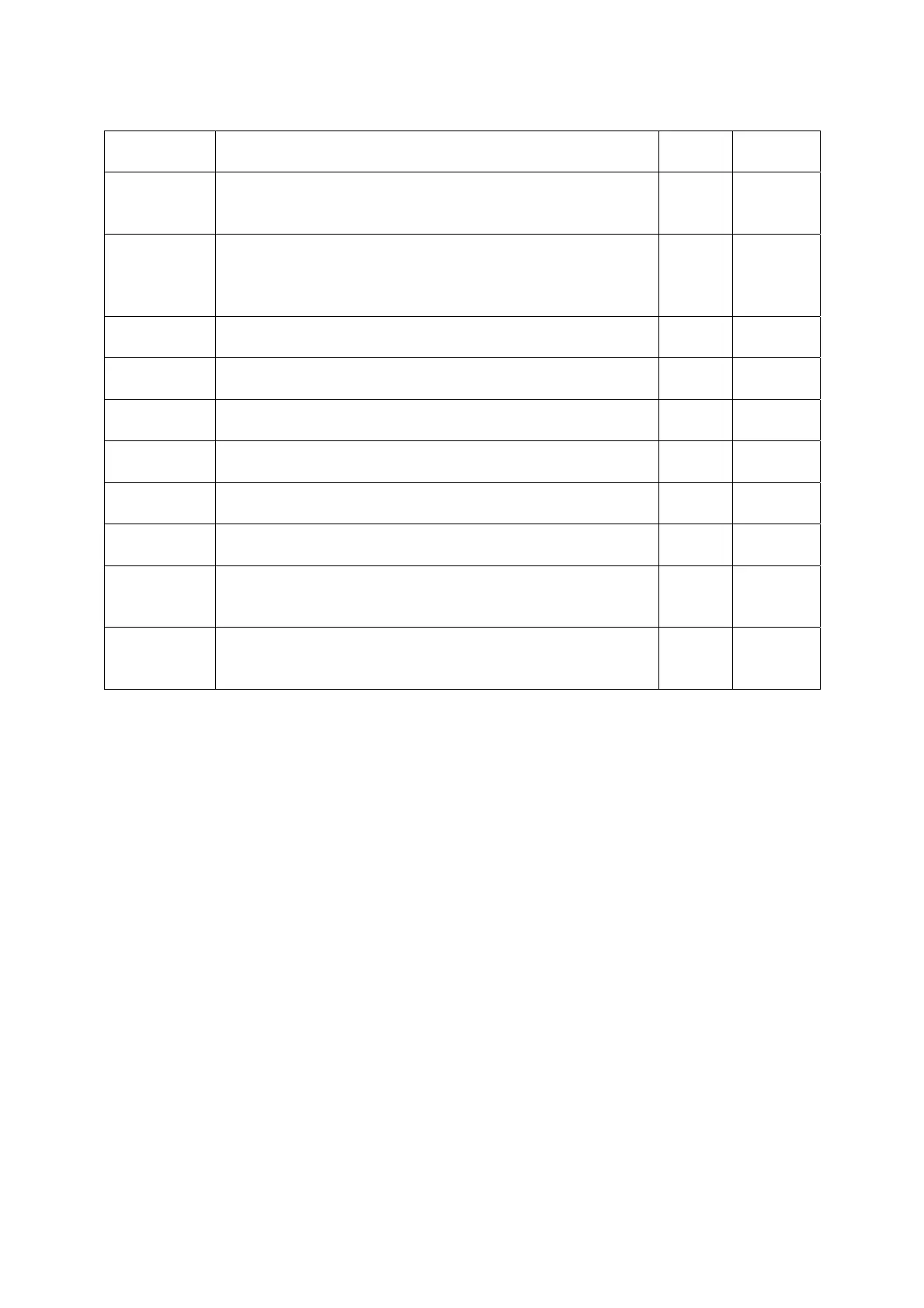
Par. Description Def. Type/
Notes
Pb70.0
Encoder in capture. If set to zero, the master encoder
value is captured by input 0, otherwise by the zero
encoder track input.
0 R/W
M
Pb70.1
Feedback. If = 0, feedback is done by the resolver, if set
to one, the feedback is from the encoder; In this last case,
the parameters Pr52 and Pr53 serve to rate the pulses per
revolution at 4096.
0 R/W
M
Pb70.2
Feedback direction . If = 1, the rotation of the motor is
inverted. Only with feedback done by the resolver.
0 R/W
M
Pb70.4
Servo error. B70.4 will be set to 1 if the position error as
an absolute value exceeds the value set in Pr55.
0 R
Pb70.5
Servo error. B70.5 will be set to 1 if the position error as
an absolute value exceeds the value set in Pr56.
0 R
Pb70.6
Feed-forward enable. If set to 1, the feed-forward on the
position regulator is enabled.
0(*) R/W
M
Pb70.7
Feed-forward scale enable.
0 R/W
M
Pb70.13
Monitor error. If set to one, Pr38 = Pr51 / 2
Pr89
.
0 R/W
M
Pb70.14
Value master captured If set to 1, this means that the
value master has been captured. The user must reset the
bit.
0 R/W
M
Pb70.15
alue motor captured If set to 1, this means that the
value motor has been captured. The user must reset the
bit.
0 R/W
M
(*) 1 for operative mode 14
0 for the other.