120 Version: 1.2.1 MS249E C-863.12 Mercury Controller
▪ Global variables are created and modified using ADD, CPY or VAR. They can be deleted
with VAR.
▪ The variable values can be queried with VAR?.
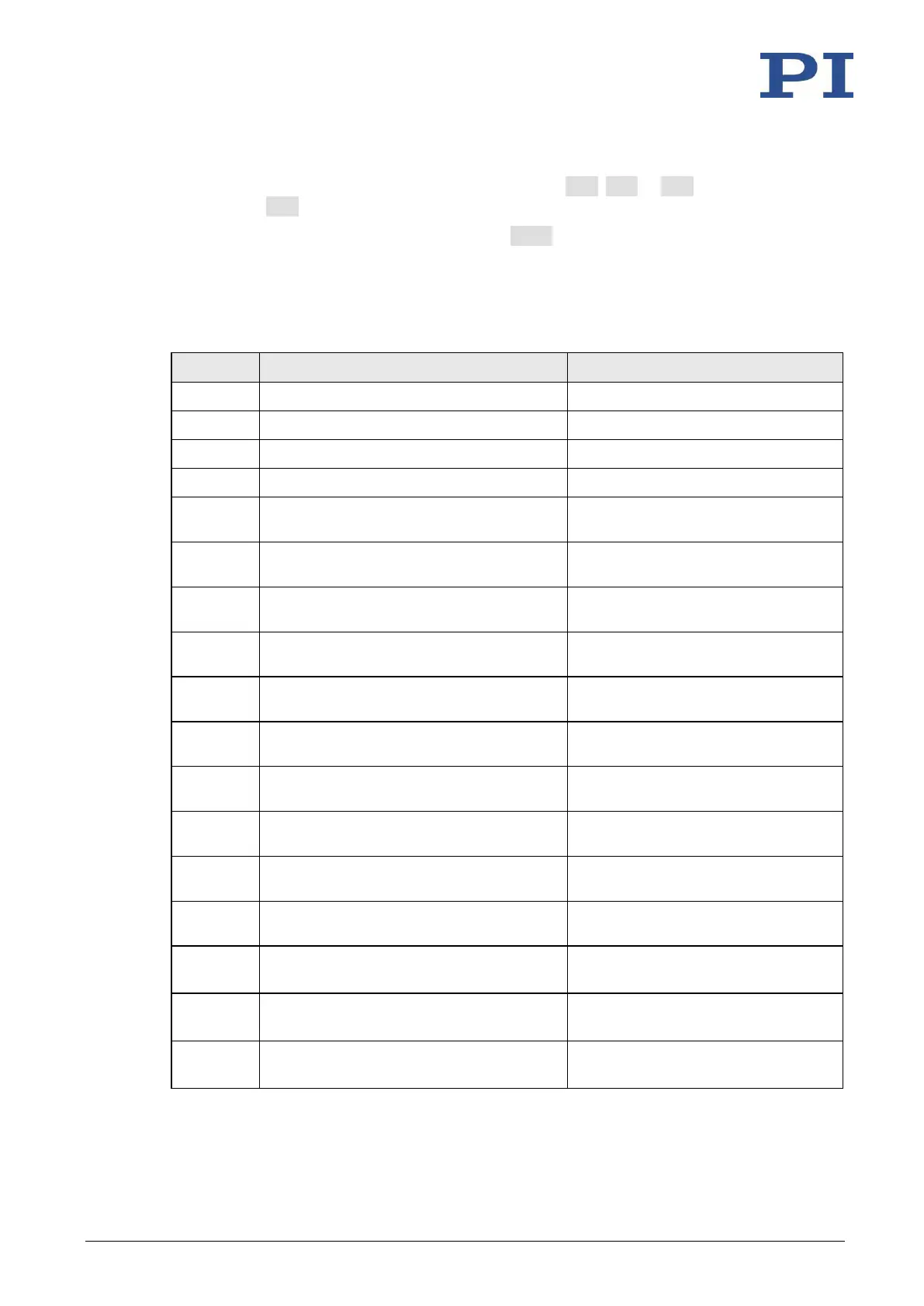
8.5 Command Overview
Request Controller Ready Status
Query If Macro Is Running
Get Device Identification
ACC {<AxisID> <Acceleration>}
Set Closed-Loop Acceleration
Get Closed-Loop Acceleration
ADD <Variable> <FLOAT1> <FLOAT2>
BRA {<AxisID> <BrakeState>}
Set Brake Activation State
Get Brake Activation State
Get Assignment Of Stages To Axes
Get Current Syntax Version
CTO {<TrigOutID> <CTOPam> <Value>}
Set Configuration Of Trigger Output