C-863.12 Mercury Controller MS249E Version: 1.2.1 73
7.1 Motion Errors
7.1.1 Behavior with Motion Errors
Motion errors can be caused for example, by malfunctions of the drive or the position sensor of
the positioner.
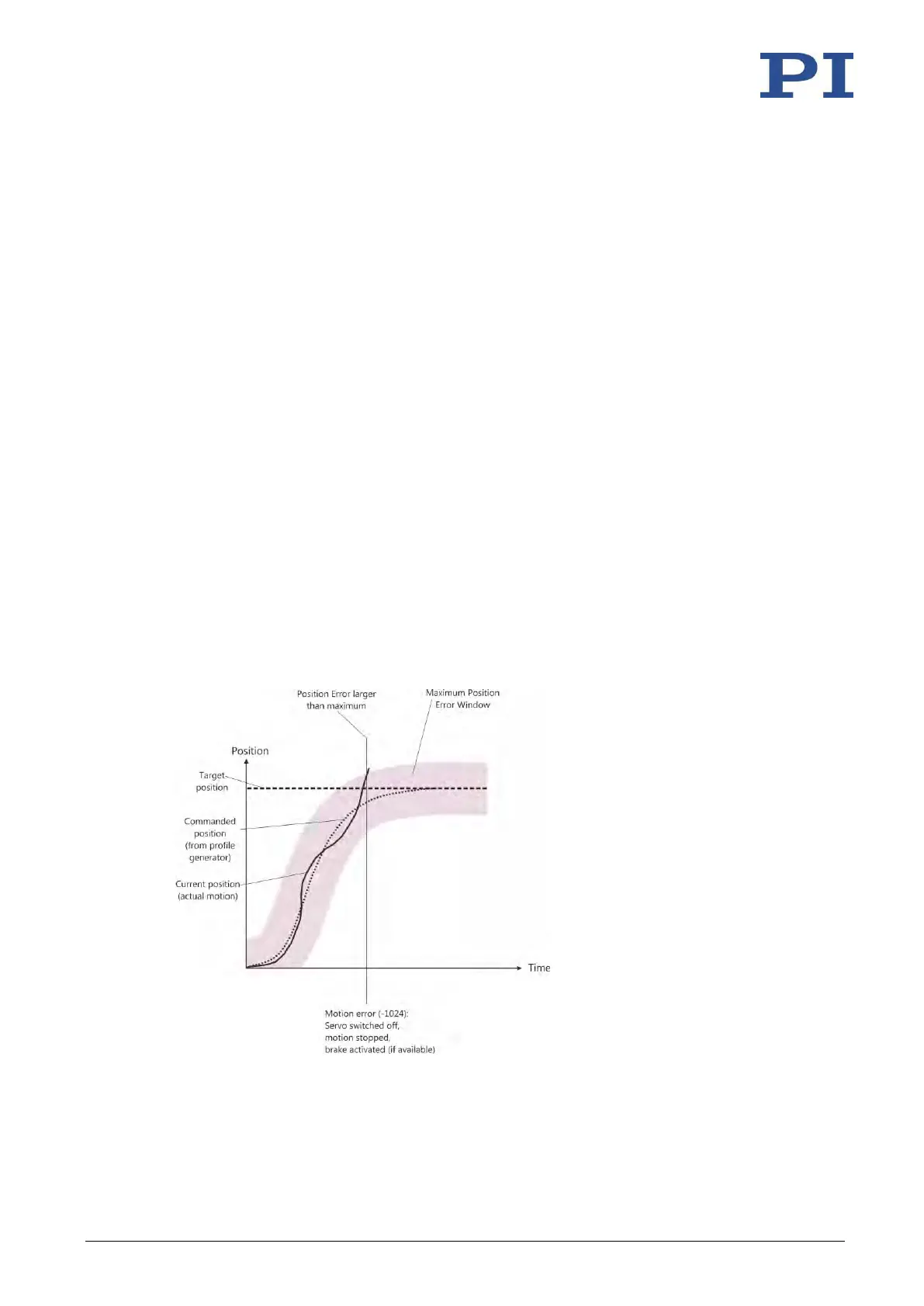
A motion error occurs, when the position error (i.e., the absolute value of the difference
between the current position and the commanded position) exceeds the specified maximum
value in closed-loop operation. The range in which the deviation may lie is specified by the
Maximum Position Error (Phys. Unit) parameter (ID 0x8).
If motion error occurs, the C-863.12 reacts as follows to protect the system against damage:
▪ The servo mode is switched off for the axis in question.
▪ If applicable, the brake is activated for the axis in question.
▪ All motion is stopped.
▪ Error code -1024 is set.
Figure 20: Behavior in case of motion errors