90 Version: 1.2.1 MS249E C-863.12 Mercury Controller
7.6.2 Commands and Parameters for Joystick Control
Commands
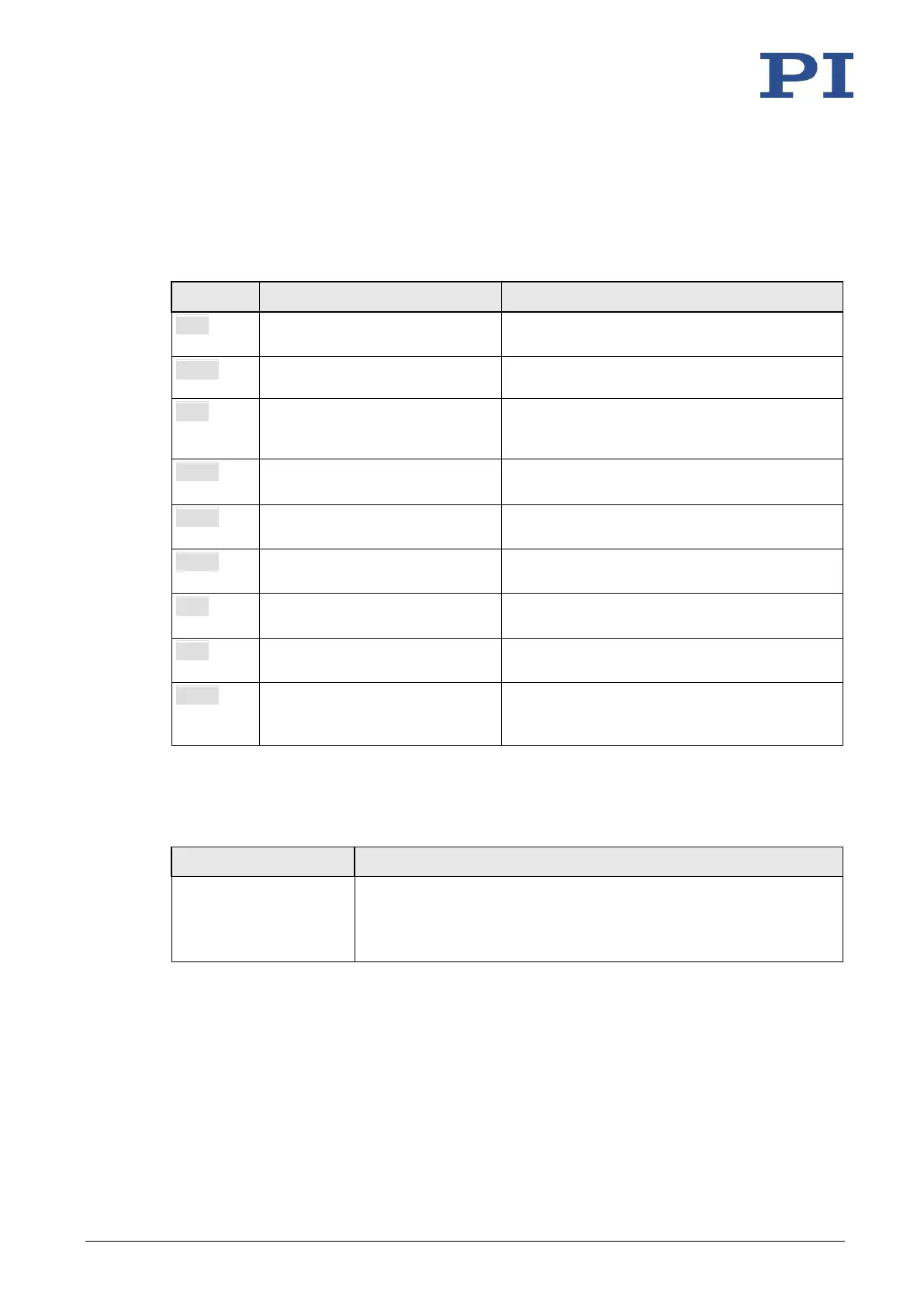
The following commands are available for the use of the joystick:
JON {<JoystickID> <uint>}
Activates or deactivates a joystick connected to
the controller.
Gets the activation state of the joystick.
JAX <JoystickID> <JoystickAxis>
<AxisID>
Specifies the axis that is controlled by a joystick
connected to the controller.
JAX? [{<JoystickID>
<JoystickAxis>}]
Gets the axis that is controlled by a joystick
connected to the controller.
JAS? [{<JoystickID>
<JoystickAxis>}]
Gets the current state of a joystick axis
(displacement).
JBS? [{<JoystickID>
<JoystickButton>}]
Gets the current state of a joystick button
(pressed or not pressed).
JDT {<JoystickID> <JoystickAxis>
<uint>}
Specifies a default lookup table type for a
joystick axis.
JLT <JoystickID> <JoystickAxis>
<Addr> <floatn>
Fills the lookup table for a joystick axis with
custom values.
JLT? [<StartPoint>
<NumberOfPoints>
[{<JoystickID> <JoystickAxis>}]]
Gets the current valid lookup table values.
Parameters
The following parameters are available for the use of the joystick:
Description and possible values
Invert Direction Of
Motion For Joystick-
Controlled Axis?
0x61
Specifies the direction of motion for joystick-controlled axes.
0 = direction of motion not inverted (default setting)
1 = direction of motion inverted