C-863.12 Mercury Controller MS249E Version: 1.2.1 11
3.5 Functional Principles
3.5.1 Block Diagram
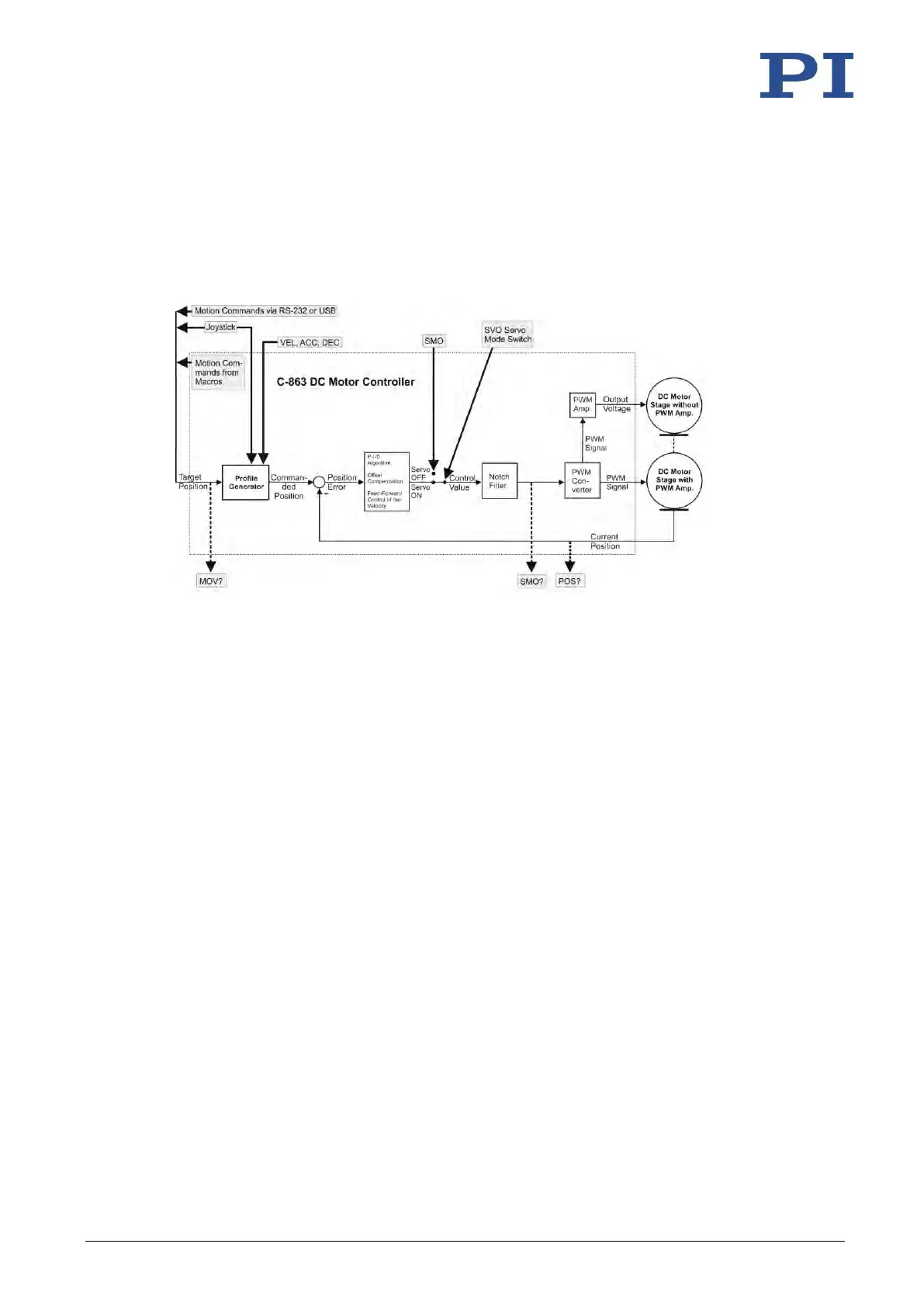
The C-863.12 controls the motion of the logical axis of a positioner. The following block diagram
shows how the C-863.12 generates the output signal for the axis connected:
Figure 3: C-863.12: Control value generation
The C-863.12 supports both positioners with PWM amplifier and positioners without PWM
amplifier (p. 43). The positioner must be equipped with an encoder with A/B quadrature signal
transmission for feedback of the current position.
3.5.2 Motor Control
The maximum output voltage of the C-863.12 is only as high as its supply voltage. To avoid
damaging the motor by excessive operating voltage, the C-863.12 scales its output voltage to
the motor connected.
Details on scaling:
▪ The C-863.12 compares its current supply voltage (maximum 48 V) to the value of
parameter 0x7C (Maximum Motor Output (V)), which specifies the maximum
permissible operating voltage of the motor (maximum of 48 V depending on the motor
type; see the documentation for the positioner).
▪ Depending on the result of the comparison, the C-863.12 scales the control value for
the PWM converter (see block diagram (p. 11)) and therefore the output voltage as
well.
Example:
The C-863.12 is operated with a 24 V power adapter. The motor of the positioner connected is
designed for a maximum operating voltage of 12 V, which means that parameter 0x7C has a