28 Version: 1.2.1 MS249E C-863.12 Mercury Controller
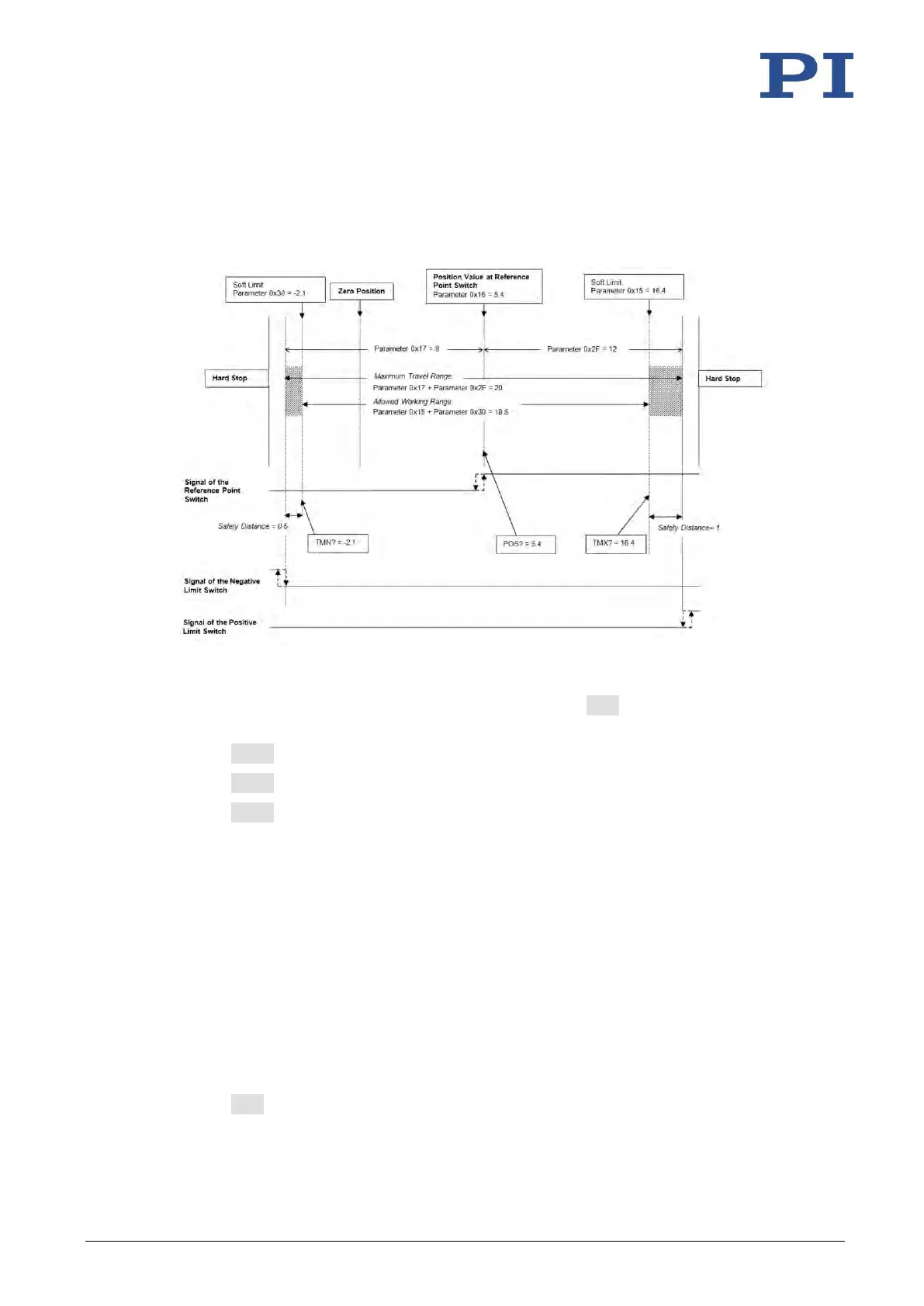
▪ Parameter 0x30 = -2.1
According to that, the axis can move 16.4 mm from the zero position in the positive direction
and 2.1 mm in the negative direction respectively. The limit switches can no longer be used for
reference moves.
Figure 9: The travel range of the axis is limited by soft limits.
After a reference move of the axis to the reference switch (FRF command), query commands
return the following responses:
▪ TMN? returns the value -2.1
▪ TMX? returns the value 16.4
▪ POS? returns the value 5.4
3.5.14 Referencing
When switching on or restarting, the controller does not know the absolute position of the axis.
Before absolute target positions can be commanded and reached, referencing must therefore
be done for the axis.
Referencing can be done in different ways:
▪ Reference move (default): A reference move moves the axis to a defined point, e.g., to
the reference switch or to a limit switch. At this point, the current position is set to a
defined value. The controller now knows the absolute axis position.
▪ Setting the absolute position manually: If this referencing method was activated by the
RON command (p. 183), you can set the current position of the axis to an arbitrary