66 Version: 1.2.1 MS249E C-863.12 Mercury Controller
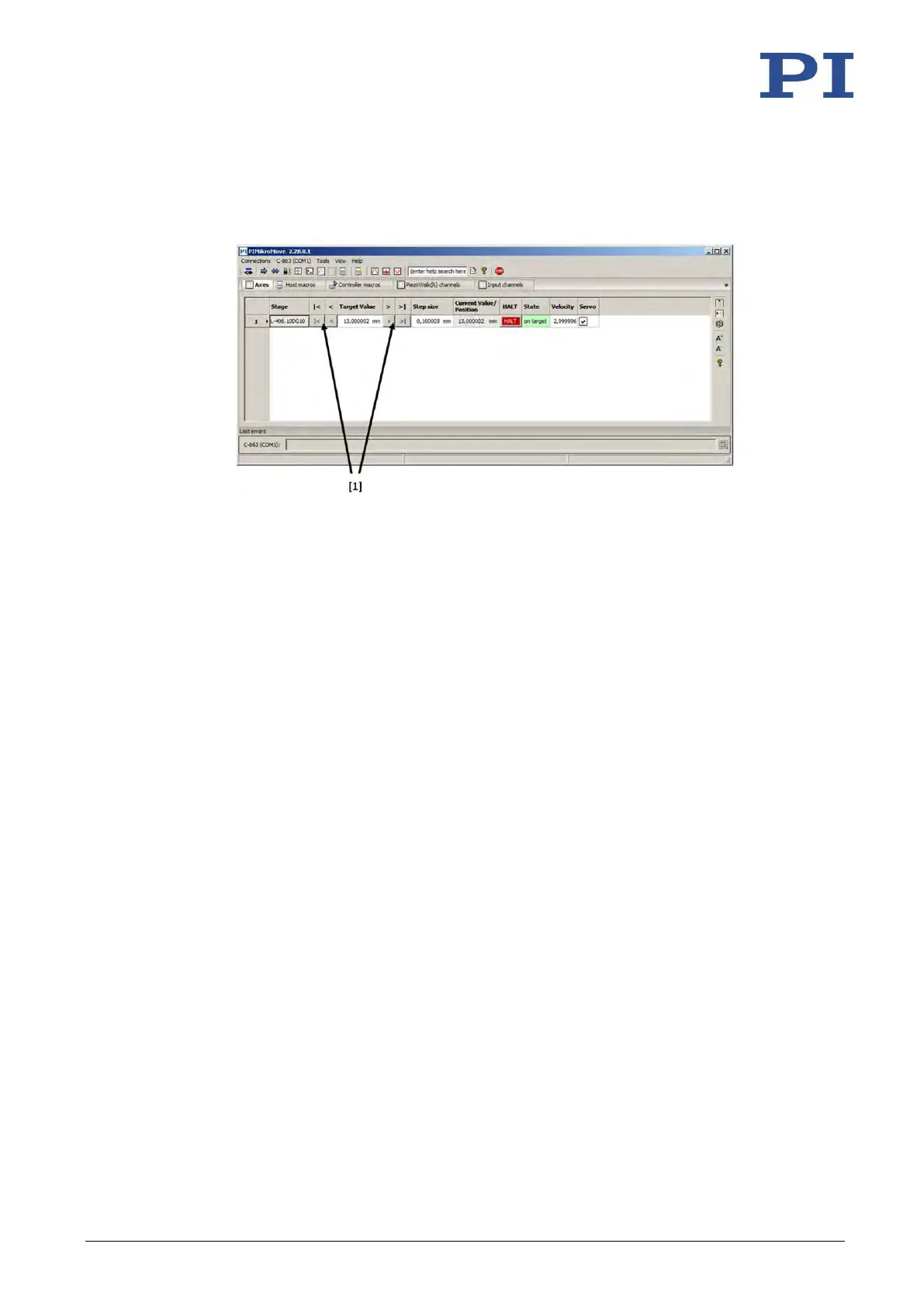
By clicking the corresponding arrow keys for the axis in the main window of
PIMikroMove for example, it is possible to initiate motion over a particular distance
(specification in Step size column) or to the limits of the travel range.
[1] Arrow keys for motion; main window of
PIMikroMove
6.6 Optimizing the Servo Control Parameters
Adjusting the PID controller optimizes the dynamic properties of the system (overshoot and
settling time). The optimum P-I-D controller settings depend on your application and your
requirements.
As a rule, optimization occurs empirically and involves the following parameters. For details, see
"Servo Algorithm and Other Control Value Corrections" (p. 21):
▪ P Term (0x411)
▪ I Term (0x412)
▪ D Term (0x413)
▪ I-Limit (0x414)
Various values are used in closed-loop operation and the behavior of the positioner is
monitored.
PIMikroMove is used in the following for optimizing the servo control parameters.
Requirement
✓ You have installed the positioner in the same way as it will be used in your application
(corresponding load, orientation, and mounting).
✓ You have started initial motion (p. 62) with PIMikroMove.
✓ All devices are still ready for operation.