62 Version: 1.2.1 MS249E C-863.12 Mercury Controller
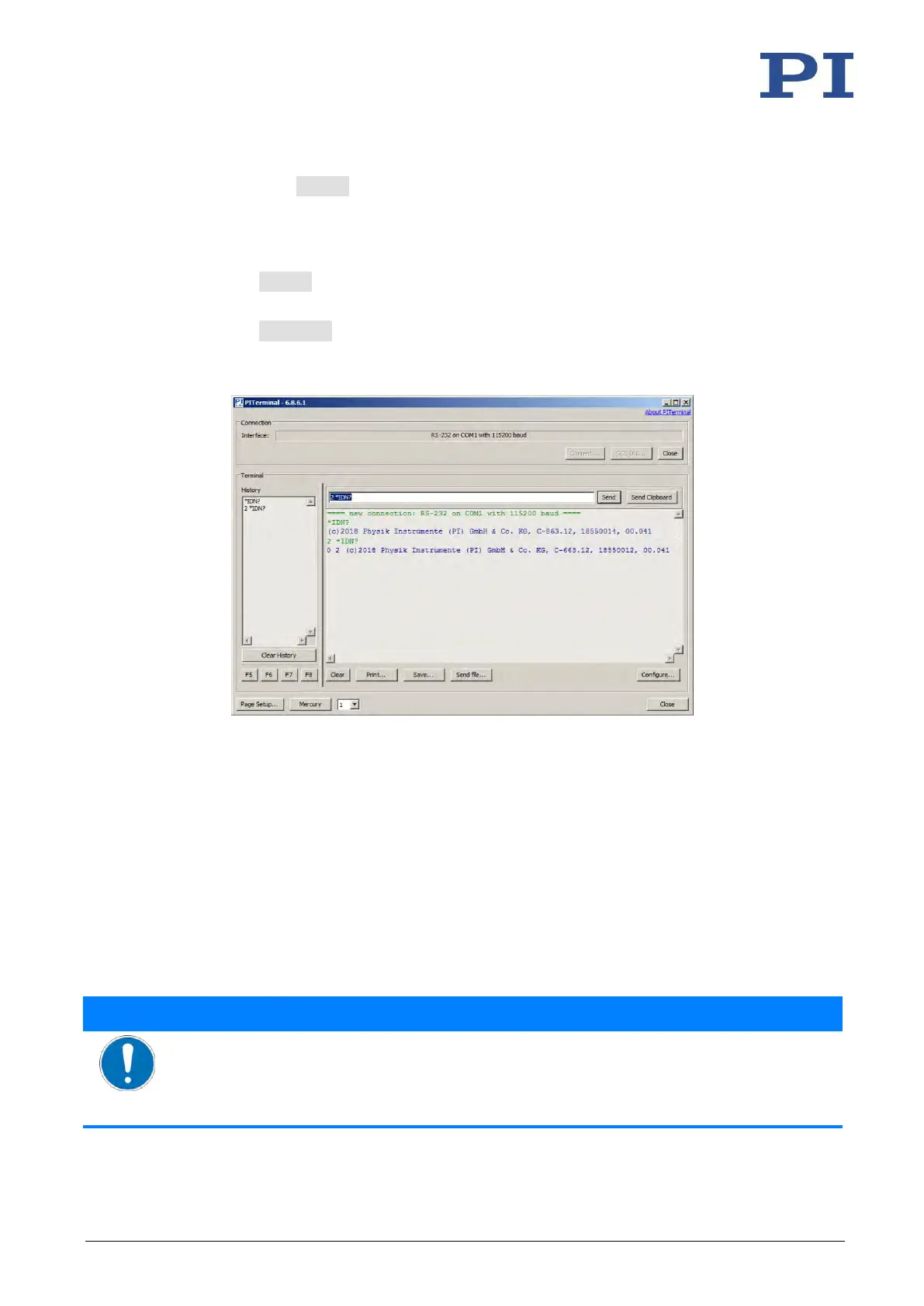
6. Send the *IDN? command for every controller in the daisy chain network to check the
communication.
In the example in the following figure, the daisy chain network comprises a C-863.12
with the controller address 1 and a C-663.12 with the controller address 2. Send:
− *IDN? to query the device identification string of the controller with the address
1; the controller address is not required (because = 1)
− 2 *IDN? to query the device identification string of the controller with the
address 2.
For further information, see "Target and Sender Address" (p. 117).
6.5 Starting Motion
PIMikroMove is used in the following to move the positioner. The program guides you through
the following steps so that you do not have to deal with the respective GCS commands:
▪ Adapting the parameter settings of the C-863.12 to the connected positioner by loading
a parameter set from a positioner database
▪ Switching on the servo mode (closed-loop operation)
▪ Doing a reference move; details see "Referencing" (p. 28).
Selecting an incorrect positioner type
Selecting an incorrect positioner type in the PC software can damage the positioner.
➢ Make sure that the type of positioner selected in the PC software matches the positioner
that is connected.