C-863.12 Mercury Controller MS249E Version: 1.2.1 17
3.5.7 Motion Triggering
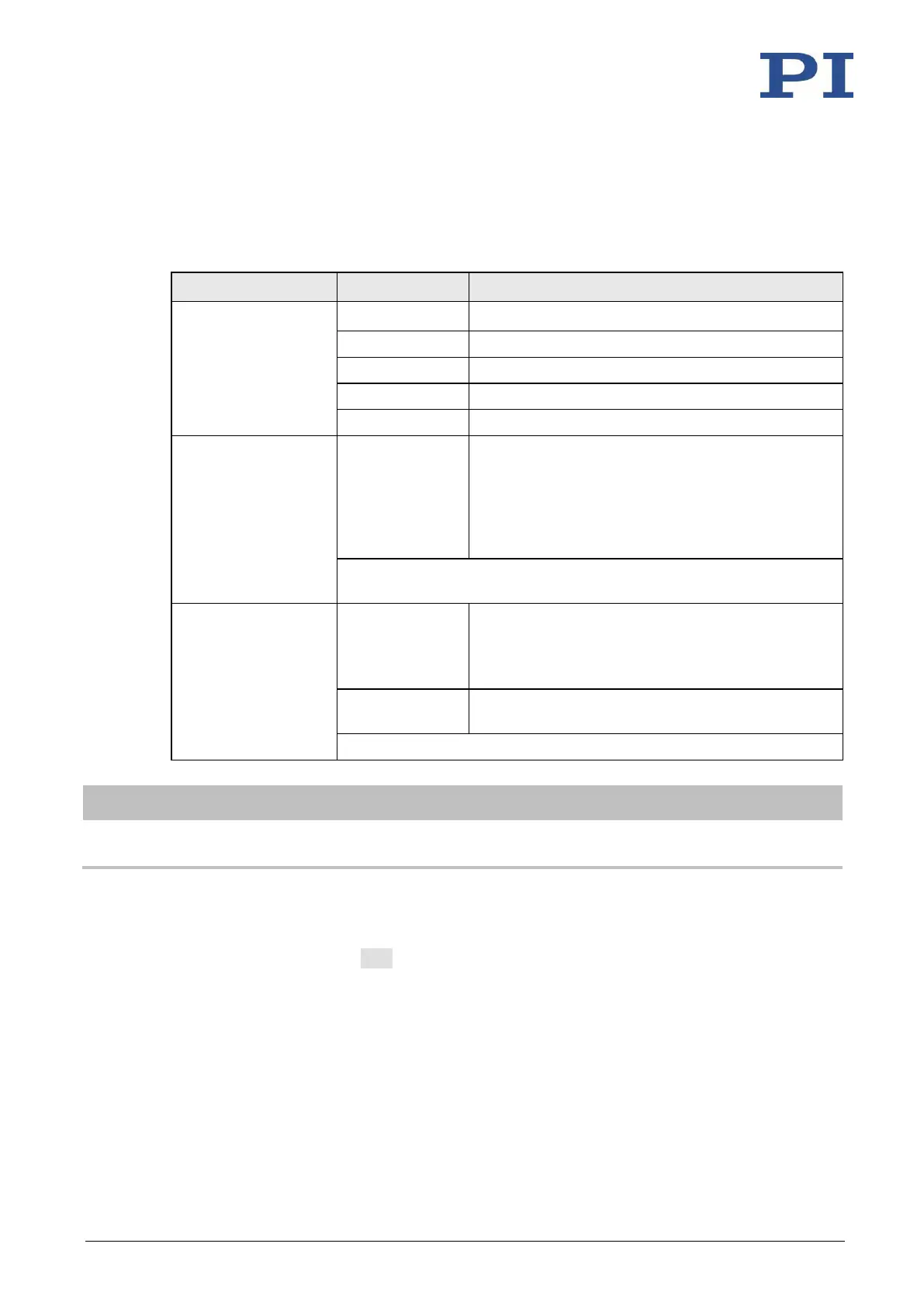
Motion in closed-loop operation
Motion commands,
sent from the
command line or via
the PC software
Motion to absolute or relative target position
Starts a step and records the response
Starts moves to signal edges
Controller macros
with motion
commands
Calls a macro function. Permits recording, deleting,
and running macros on the controller.
Any commands can be sent from the command line
while a macro is running on the controller. The
macro content and motion commands received
from the command line can overwrite each other.
Additional macro commands and information see "Controller Macros"
(p. 97).
Joystick control
The joystick controls
the velocity of the
axis (commanded
velocity output from
the profile generator).
Activates or deactivates a joystick connected to the
controller.
Motion commands are not allowed when joystick
control is activated for the axis.
Specifies the axis controlled by a joystick connected
to the controller.
Additional joystick commands see "Joystick Control" (p. 89).
Absolute target positions can only be commanded if the axis was referenced beforehand; see
"Referencing" (p. 28).
Motion in open-loop operation
Motion is triggered by the SMO command, which specifies the control value for the PWM
converter in the C-863.12.
Joystick control is not possible in open-loop operation.