30 Version: 1.2.1 MS249E C-863.12 Mercury Controller
Commands
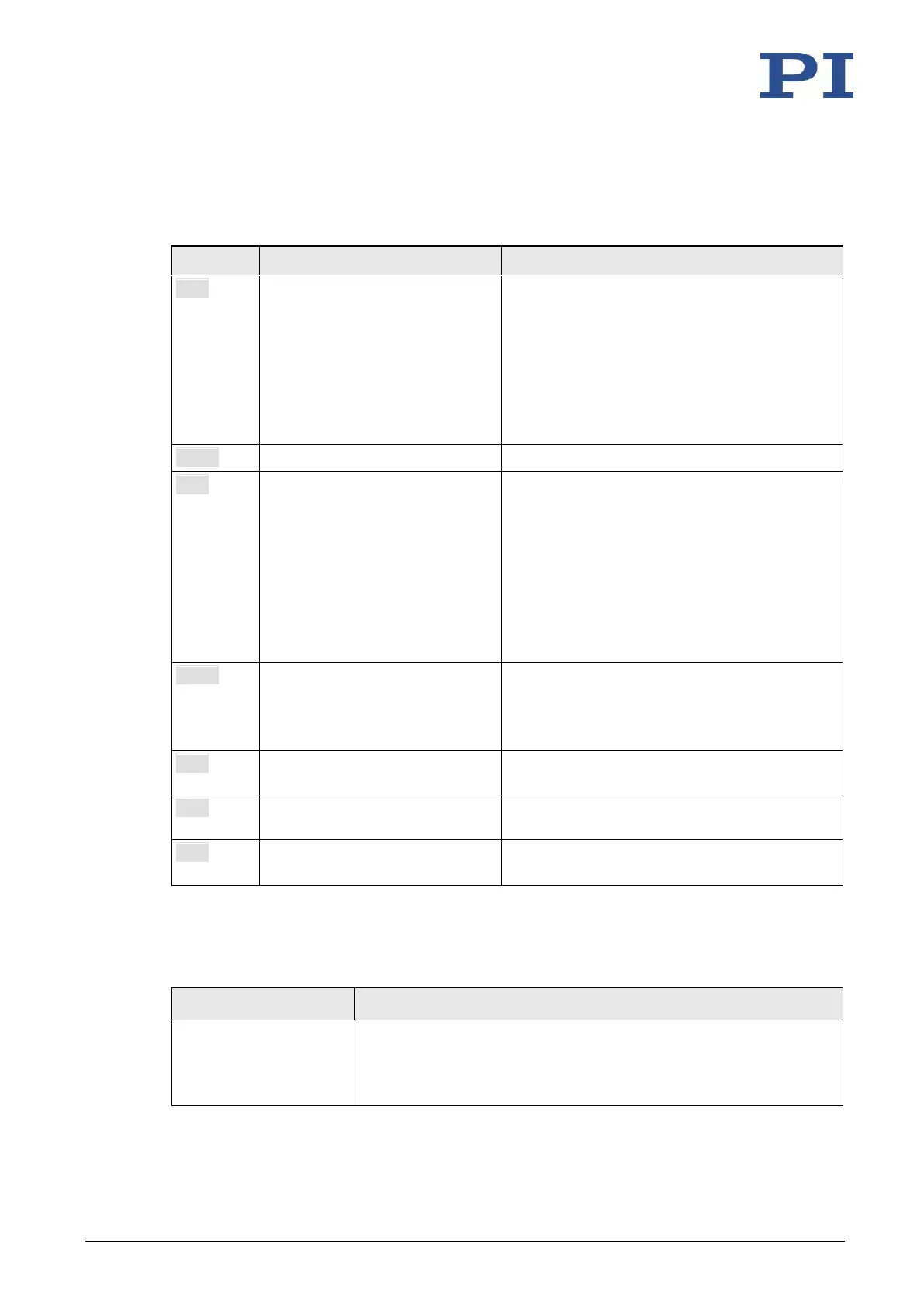
The following commands are available for referencing:
RON {<AxisID> <ReferenceOn>}
Selects the referencing method:
▪ <ReferenceOn> = 0: An absolute position
value can be assigned with POS, or a
reference move can be started with FRF,
FNL or FPL.
▪ <ReferenceOn> = 1 (default): A reference
move must be started with FRF, FNL or FPL.
Using POS is not allowed.
Gets the referencing method.
Starts a reference move to the reference
switch.
The approach depends on the value of the
Reference Signal Type parameter (ID 0x70):
▪ 0 or 1: The approach always takes place
from the same side irrespective of the axis
position when the command is sent.
▪ 2: The approach takes place via the
negative limit switch.
Queries whether referencing for an axis has
already been done.
1 = Referencing has been done
0 = Referencing has not been done
Starts a reference move to the negative limit
switch.
Starts a reference move to the positive limit
switch.
POS {<AxisID> <Position>}
Sets the current axis position (does not trigger
motion) to reference the axis.
Parameters
Reference moves can be configured with the following parameters:
Description and Possible Values
Closed-Loop
Deceleration (Phys.
Unit/s
2
)
0xC
Deceleration in closed-loop operation
For details, see "Generation of Dynamics Profile" (p. 18).