Radiolink Electronic Ltd
www.radiolink.com
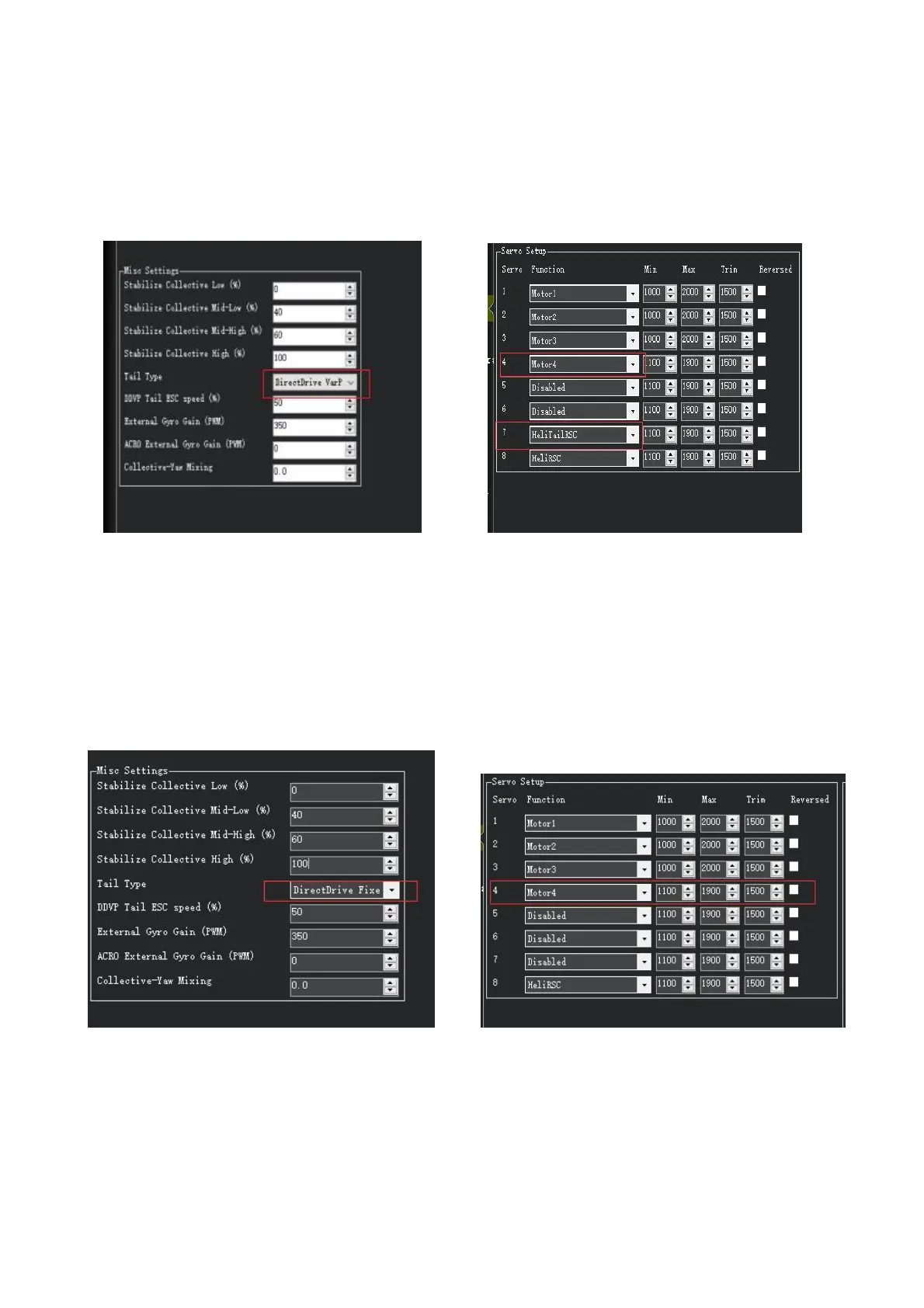
Yaw is controlled by the tail rotor pitch servo. As shown in Figure 5 below, select Direct Drive Variable Pitch
(DDVP) in the Tail Type drop-down menu to configure it to use motor-driven variable pitch to control. As shown
in Figure 6 below, set the parameter SERVOx_FUNCTION to Motor4 to control the tail rotor pitch servo (The
default output channel is channel 4). Set the parameter SERVOx_FUNCTION to "HeliTailRSC" to control the
tail motor. (The default output channel is channel 7.)
Figure 5 Select Direct Drive Variable Pitch (DDVP) Figure 6 Set Output Channel
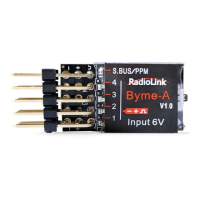
4. Direct Drive Fixed Pitch Clockwise (DDFP CW): Tail rotor is driven by a motor whose ESC is controlled by
ArduPilot to maintain yaw stability and yaw direction. Used with clockwise rotating main rotors, when viewed
from above. As shown in Figure 7 below, select Direct Drive Fixed Pitch Clockwise (DDFP CW) in the Tail
Type drop-down menu to configure clockwise motor drive fixed pitch to control. As shown in Figure 8 below,
set the parameter SERVOx_FUNCTION to "Motor4" to control the tail motor. (The default output channel is
channel 4.)
Figure 7 Select Direct Drive Fixed Pitch Clockwise Figure 8 Set Output Channel
5. Direct Drive Fixed Pitch Counter-Clockwise (DDFP CCW): Tail rotor driven by a motor whose ESC is
controlled by ArudPilot to maintain yaw stability and yaw direction. Used with counter-clockwise rotating main
rotors, when viewed from above. As shown in Figure 9 below, select Direct Drive Fixed Pitch Clockwise
(DDFP CW) in the Tail Type drop-down menu to configure counterclockwise motor drive fixed pitch to control.