Radiolink Electronic Ltd
www.radiolink.com
5.5.6 Tailrotor Setup
There are several ways for controlling the tailrotor to maintain yaw stabilization and provide yaw control, and
each have a unique setup. Search H_TAIL_TYPE in Full Parameter List. The H_TAIL_TYPE parameter is
used to specify method for controlling the tailrotor. A list of available tail types is given below:
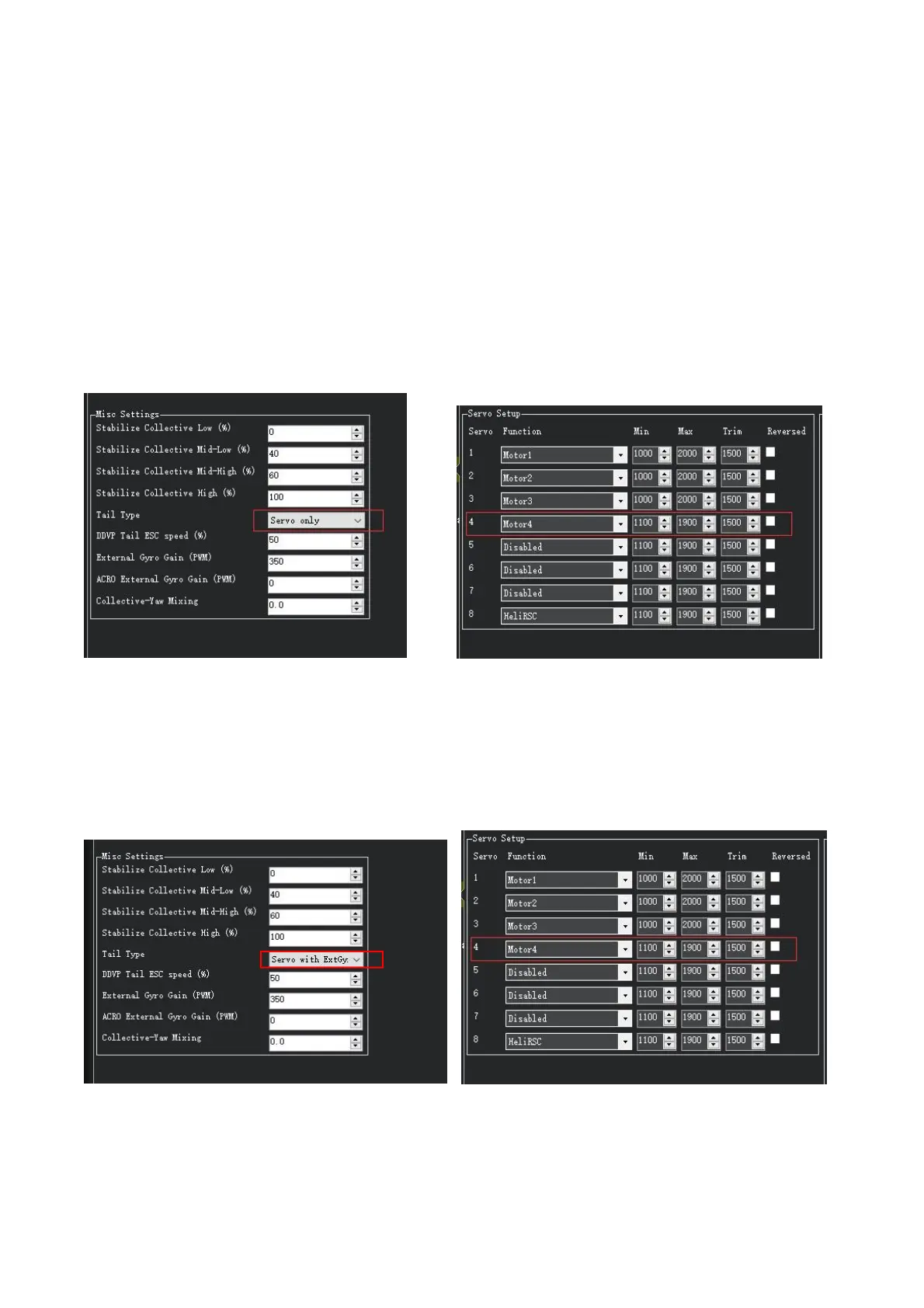
1. Servo Only: ArduPilot will supply the tail rotor stabilization like a tail rotor gyro and control the pitch of the
tail rotor blades. As shown in Figure 1 below, select Servo Only in the Tail Type drop-down menu to configure
it to use only servo control. As shown in Figure 2 below, set the parameter SERVOx_FUNCTION to Motor4 to
control the tail servo. (The default output channel is channel 4.)
Figure 1 Select Servo Only Figure 2 Set Output Channel
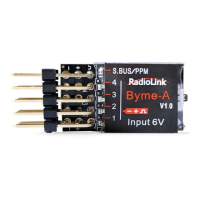
2. Servo with External Gyro: ArduPilot will output yaw demands without direct yaw attitude stabilization which
is provided via an external gyro. As shown in Figure 3 below, select Servo with External Gyro in the Tail Type
drop-down menu to configure the tail servo control with an external gyro. As shown in Figure 4 below, set the
parameter SERVOx_FUNCTION to Motor4 to control the tail servo. (The default output channel is channel 4.)
Figure 3 Select Servo with External Gyro Figure 4 Set Output Channel
3. Direct Drive Variable Pitch (DDVP): The motor drives the variable pitch, and the control system consists of
a servo and a motor. The tail rotor is driven by the motor, and the ESC of the motor is controlled by ArduPilot.