Radiolink Electronic Ltd
www.radiolink.com
(5) The H_COL_LAND_MIN parameter is used as the lower collective pitch limit in degrees for modes that
use altitude hold in the vertical axis. This keeps the autopilot from driving collective too low resulting in
ground resonance and is also used to detect landing in these modes. The default angle
for H_COL_LAND_MIN parameter is set to -2 degrees collective blade pitch angle and would allow
symmetrical blade equipped vehicles to descend at a reasonable rate, yet avoid being too negative on
the ground. If you have non-symmetrical blades, then set it to a blade pitch that is lower by the amount
used as the zero thrust pitch angle. For example, if the H_COL_ZERO_THRST is determined to be -3
deg then H_COL_LAND_MIN should be set to -5 degrees.
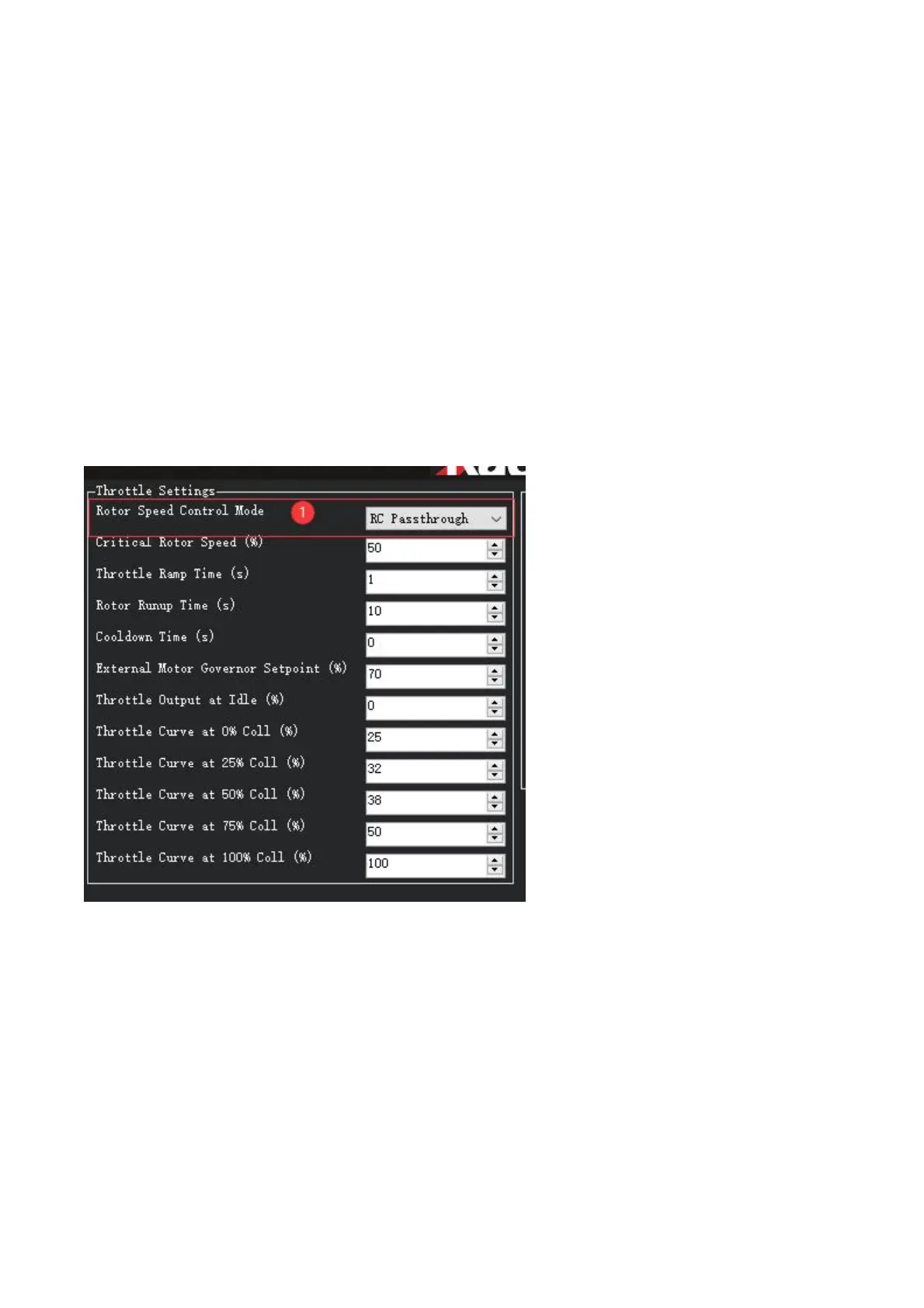
5.5.4 Rotot Speed Control Setup
1. Set the RSC Mode parameter (H_RSC_MODE). Click the drop-down menu in the figure ① below to select
RSC modes.
There are different RSC modes. The RSC modes are listed below with a short description.
(1) RC Passthrough - this mode passes through the RC channel input on which the Motor Interlock
(RCx_OPTION =32) is assigned. The channel must be over 1200us in order for the heliRSC output to
follow the RC input. Otherwise, heliRSC will be H_RSC_IDLE.
(2) RSC setpoint - this mode is used for helicopters utilizing either an electronic speed controller or an
external governor for internal combustion engines. The PWM passed to the HeliRSC output is
determined from the External Motor Governor Setpoint (H_RSC_SETPOINT) parameter. The output
PWM is calculated by the following equation: PWM output = RSC_SETPOINT*0.01*(SERVOx_MAX -
SERVOx_MIN) + SERVOx_MIN where SERVOx is the output assigned to Throttle. This mode will be the
most commonly used mode for electric helis having an ESC with governor mode built in.
(3) Throttle curve - This mode is an open loop control of the HeliRSC servo output. Users will need to fine-
tune the throttle curve to maintain the desired rotor speed throughout the flight envelope. The throttle
curve is a five point spline curve fit set by the H_RSC_THRCRV_x parameters. It is used to determine