Radiolink Electronic Ltd
www.radiolink.com
cceleration Max for Pitch
When you think that the response
speed in which direction is slow, you
can add it, but note that after the
modification, the PID in the
corresponding direction must also be
modified in direction. It is
recommended to modify the yaw
direction value, because the control
algorithm, the tail response will be very
slow
Acceleration Max for Roll
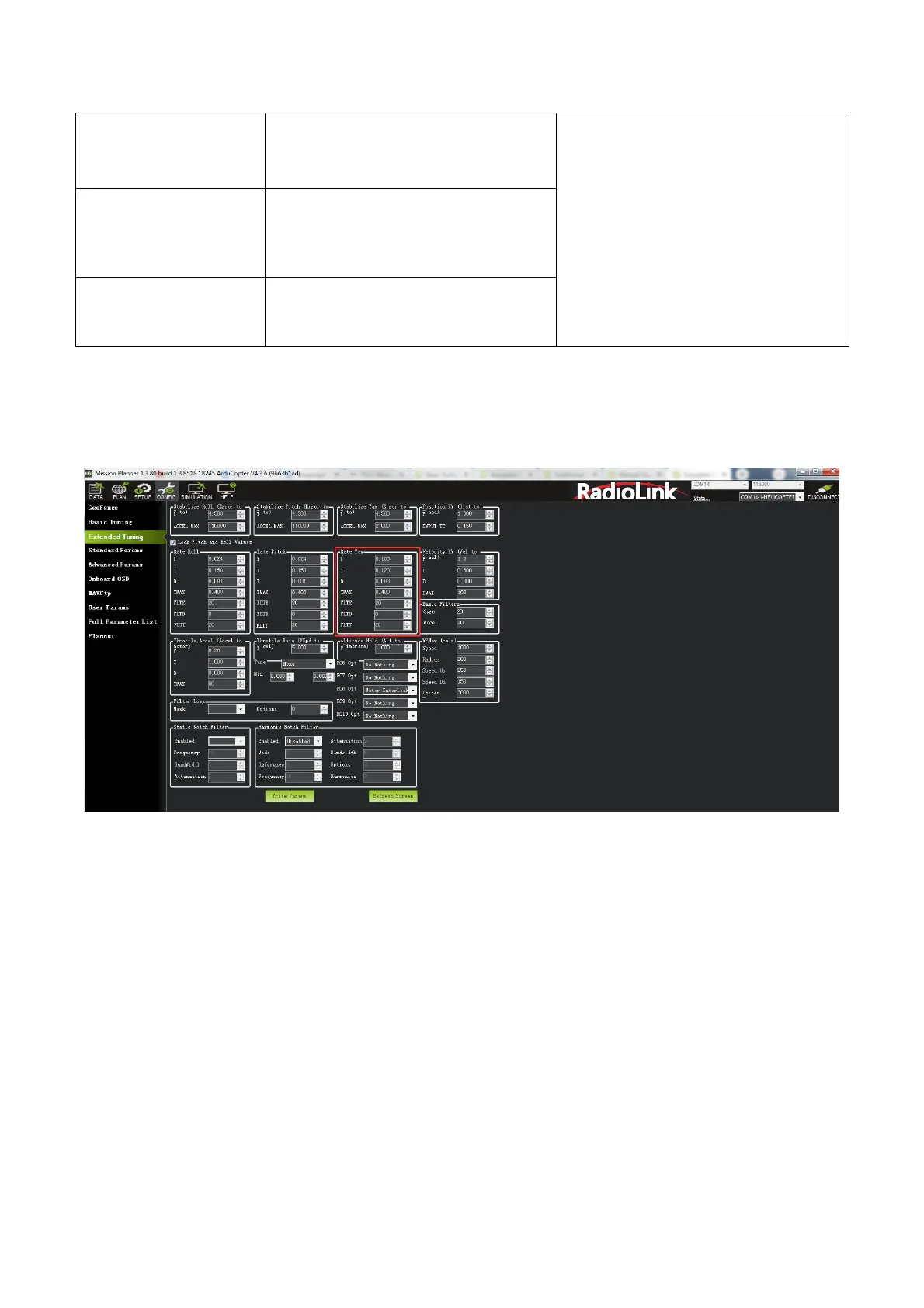
7.2 Rate Yaw
Take off to a height of 0.3 meters with default parameters (please pay attention to safe operation because it
may be not easy to fly it at the beginning)
To check the tail lock:
Increase Yaw's P if tail won't lock
Lower Yaw's P if the tail is wagging rapidly
It is not recommended to adjust the P value too high. If the adjustment is too large and still cannot be locked,
it is suspected of mechanical problems, link delay and other problems. You can increase the corresponding
ATC_RAT_YAW_FF to make up for the mechanical delay and other problems. When the tail rudder is
adjusted well, the attitude of roll and pitch can be adjusted better.