Radiolink Electronic Ltd
www.radiolink.com
Test #5 (optional): removing power from the receiver
Switch to stabilize mode, arm your motors and keep your throttle above zero.
Carefully disconnect the power wires connecting the receiver to the APM
The Flight Mode should switch to RTL or LAND as described in Test #3
Warning: unplug the APM so that it is powered down before reattaching the receiver’s power
4.2 EKF FailSafe
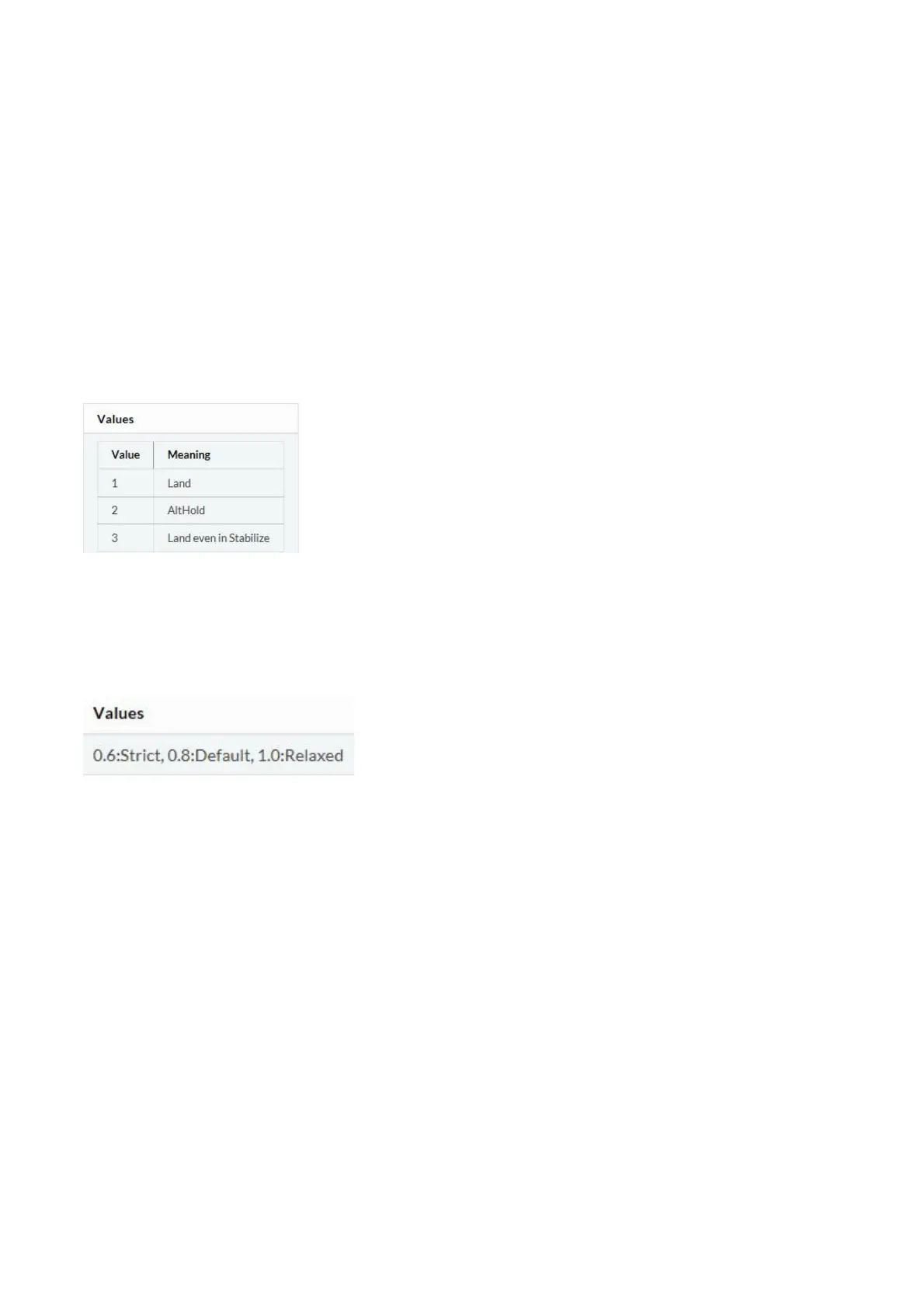
FS_EKF_ACTION
Note: This parameter is for advanced users
Controls the action that will be taken when an EKF failsafe is invoked
It defaults the value 1, that is the drone will land if lose signal, but you can change the setting from value 1 to
value 2, which means the drone will AltHold if lose signal.
FS_EKF_THRESH
Note: This parameter is for advanced users
Allows setting the maximum acceptable compass and velocity variance
5. Installation and setup of CrossFlight
5.1 Install CrossFlight on aircraft
Mount the CrossFlight at the barycenter of the drone, make sure the arrow of the CrossFlight is point to the
front.