• Min - Denes the minimum that is allowed for the global variable.
• Max - Denes the maximum value that is allowed for the global variable.
• Popup - When enabled, a pop-up window will be displayed on the main screen when the value of this global
variable changes during normal use.
• FM1 -> FM8 - Allows you to select the global variable inheritance for the Drive mode. Long press the eld to
switch between Own and Inheritance mode. In Own mode, you can dene the global variable value for the
selected Drive mode. In Inheritance mode, you can select the Drive mode that the global variable will inherit
the value from.
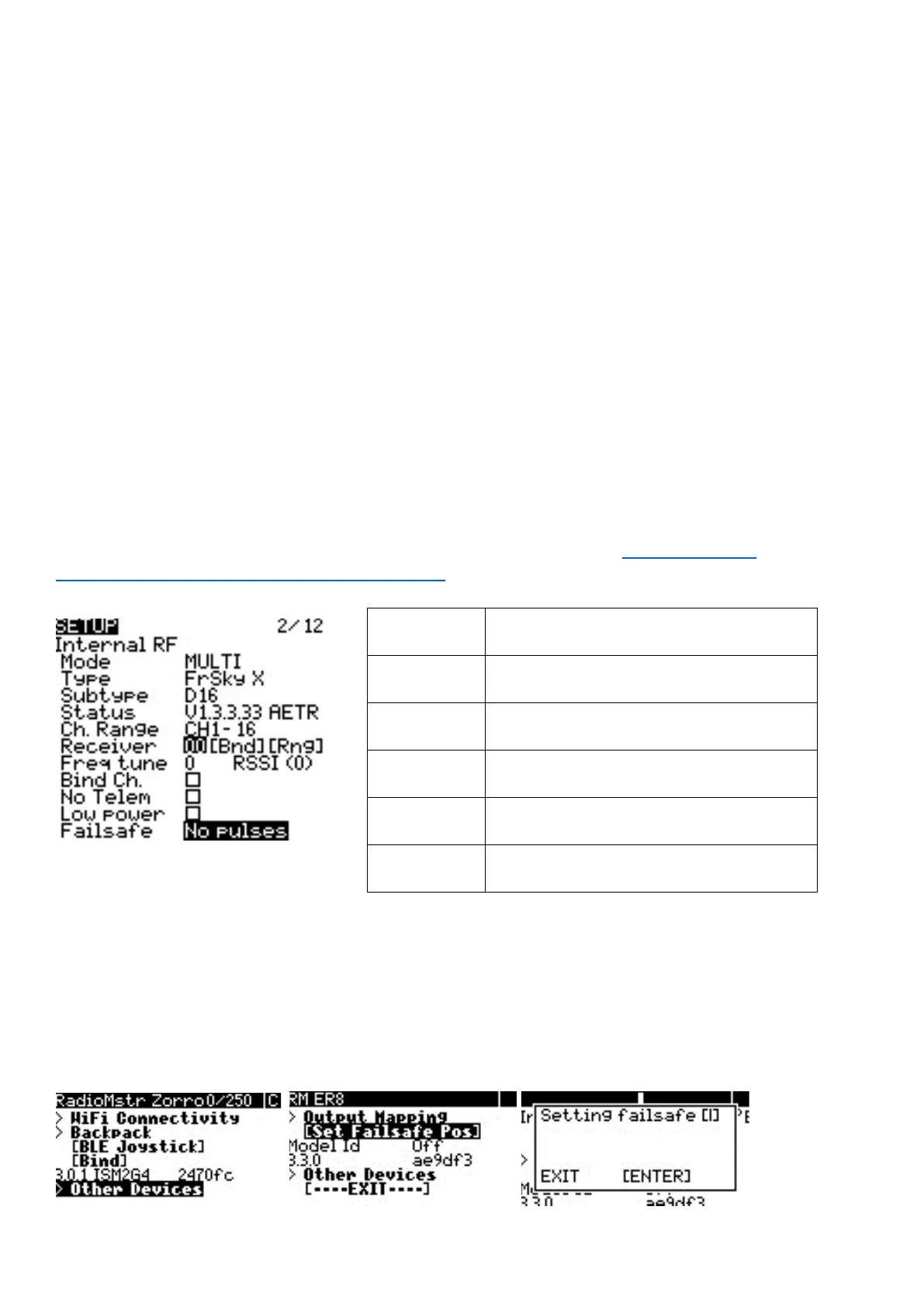
3.3. Fail Safe
4in1 Mul-Protocol Failsafe
Failsafe sengs determine what the receiver will do if radio communicaon is lost. The receiver is congured using
sengs sent from the radio as part of the radio transmission.
Conguring failsafe sengs ensures that the receiver behaves in an expected way if radio communicaons between
the radio and receiver are lost, for example by reducing throle to -100%, or acvang a return-to-home (RTH or
RTL) funcon in the ight controller.
Dierent receiver types require dierent failsafe procedures, further informaon: hps://www.mul-
module.org/using-the-module/protocol-opons#failsafe
ExpressLRS Fail safe
Once the receiver is bound and the model has been correctly setup on the radio open the ExpressLRS LUA script by
pressing the [SYS] Buon and using the roller to run the ExpressLRS script.
Once the script is loaded use the roller to scroll to “> Other Devices” to open the receiver sengs. Scroll to “[Set
Failsafe Pos]” and press enter on the roller. The posion of the trigger, wheel, knobs, switches, joysck will now be
recorded as the failsafe posion on the receiver.