6. Track Control
Track control allows the ST7000 to maintain track
between two waypoints entered on a GPS, Decca,
Loran or satellite Navigation System. The
Navigation System must have a suitable autopilot
output which at minimum transmits cross track
error to one of the following formats.
NMEA 0180 – Simple Format
NMEA 0183 – XTE
XTR
APA
APB
RMB
If the navigation system transmits the correct
NMEA 0183 sentences (shown below), the
autopilot will receive and display bearing to
waypoint, distance to waypoint and waypoint
number.
NMEA 0183 Sentence Headers
Bearing to
Waypoint
Distance to
Waypoint
Waypoint
Number
APB WDR APB
BPI WDC APA
BWR BPI BPI
BWC BWR BWR
BER BWC WDR
BEC BER BWC
RMB BEC WDC
RMB RMB
BOD
WCV
BER
BEC
6.1 Functional Test
Before attempting sea trials confirm that the
control unit is receiving navigation data by using
the Display to bring it up on the control unit LCD.
Note: If the data is not being received it is
impossible to select Track Mode.
6.2 Operating Hints
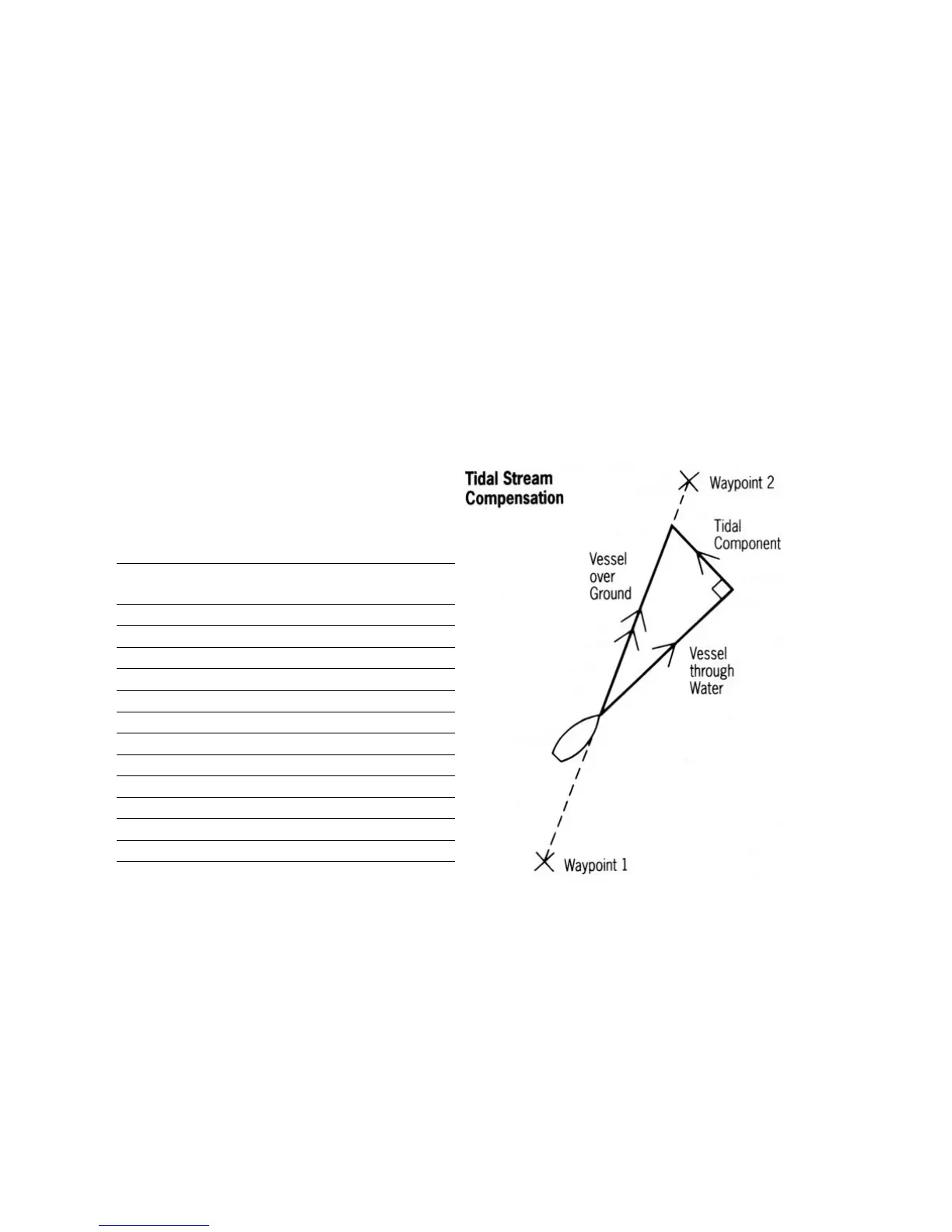
Basic Principles
The control unit accepts cross track error data
from the Navigation System and computes course
changes to maintain the desired track. It is
primarily designed to keep a vessel on track,
automatically compensating for tidal streams and
leeway.
To obtain best performance in the track following
mode the track should be manually acquired by
steering the vessel to within 0.1nm of track and
then bringing the heading to within 5 deg. Of the
bearing to the next waypoint before pressing the
Track button.
Under most conditions the Track control will hold
the track to within 0.05nm (300ft) or better.
The autopilot takes account of vessel speed when
computing course changes to ensure optimum
performance over a wide range of vessel speeds.
If an Autohelm ST50 Speed or Tridata instrument
is connected to control unit will use measured
speed, otherwise the cruise speed entered during
calibration will be used.
43
 Loading...
Loading...